Membrane type joint of mobile robot, robot and multi-machine cooperative carrying system
A mobile robot and robot technology, applied in the field of mobile robots, can solve problems such as difficult adjustment of stiffness, poor stability, large joint offset, etc., and achieve the effect of preventing excessive offset and avoiding direct collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention and should not be construed as limiting the present invention.
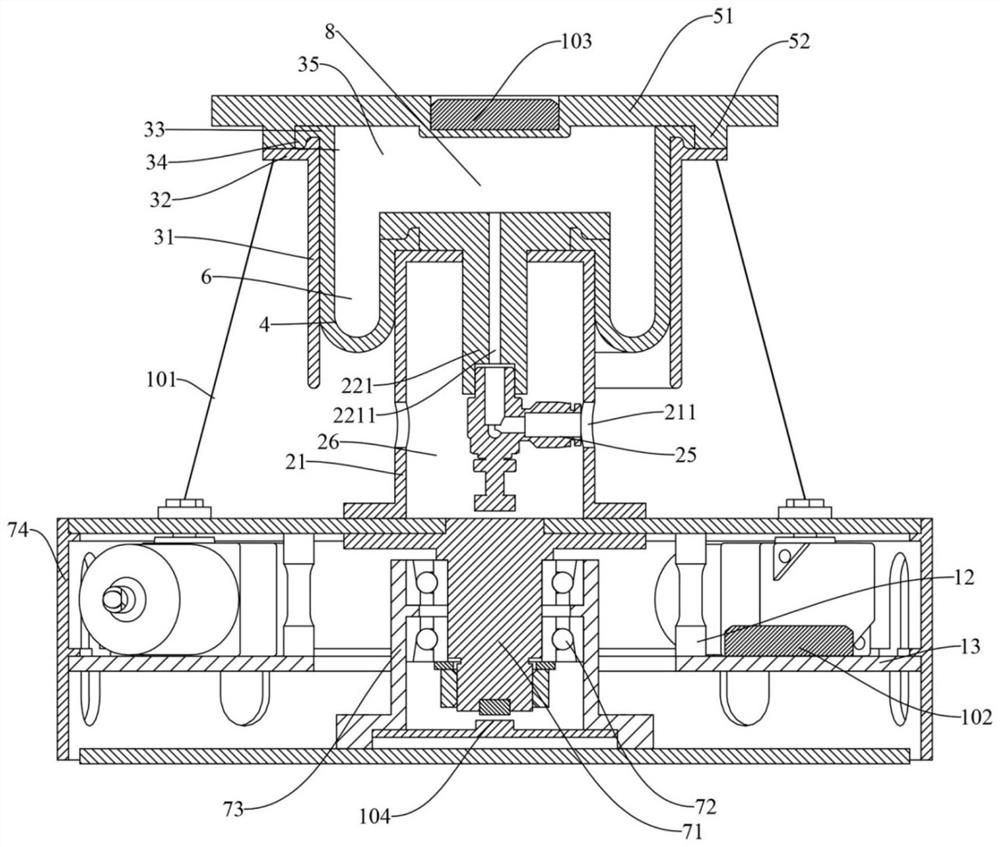
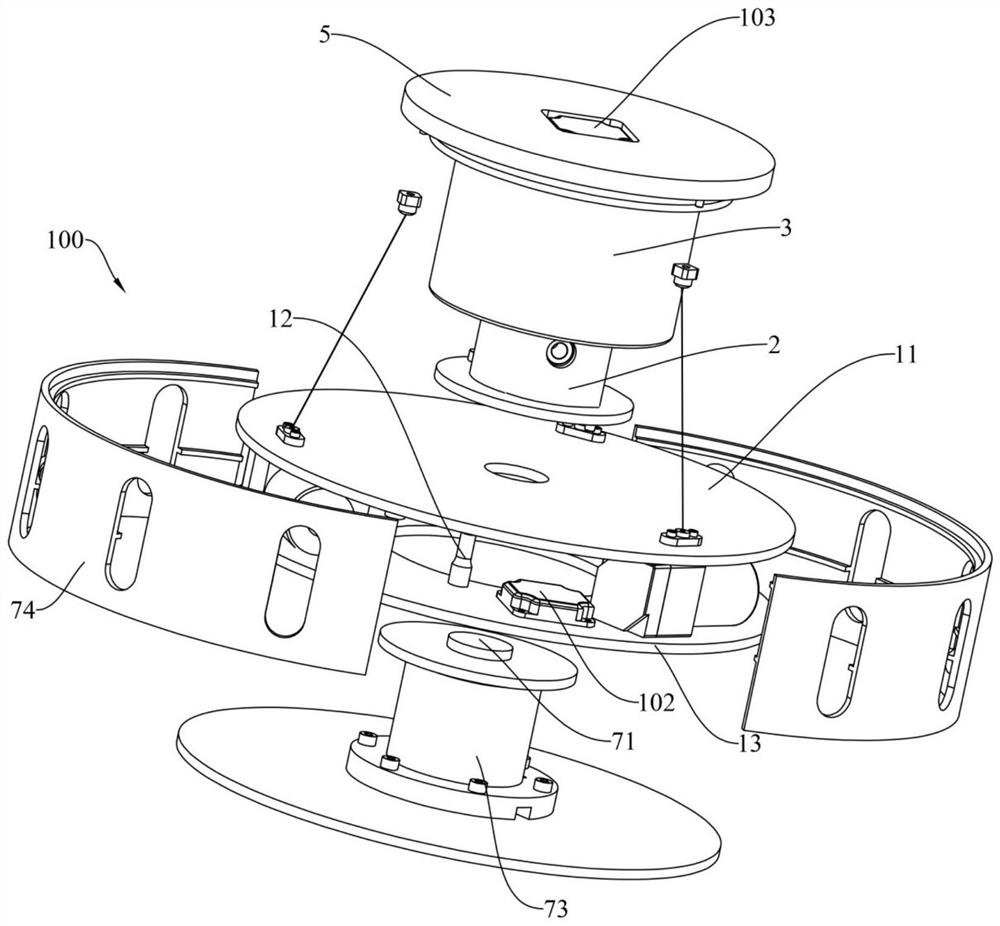
[0046] Reference below Figure 1-Figure 8 The membrane joint 100 of the mobile robot, the robot having the joint and the multi-machine cooperative handling system according to the embodiment of the present invention are described.
[0047] The membrane joint 100 of the mobile robot according to the embodiment of the present invention includes an adapter seat 1 , an air bag 4 , a carrier plate 5 , a plurality of linear displacement sensors 101 , a lower joint arm 2 and an upper joint arm 3 .
[0048] The upper joint arm 3 has a first cavity 35, a part of the lower joint arm 2 is arranged in the first cavity 35, and the lower part ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More