

Fire rescue unmanned aerial vehicle system capable of replacing battery in air and control method of fire rescue unmanned aerial vehicle system
A drone and battery technology, applied in the field of drones, can solve the problems of difficult battery replacement work, difficult battery replacement, etc., and achieve the effect of strong obstacle avoidance, accurate gesture recognition, and improved gesture recognition distance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
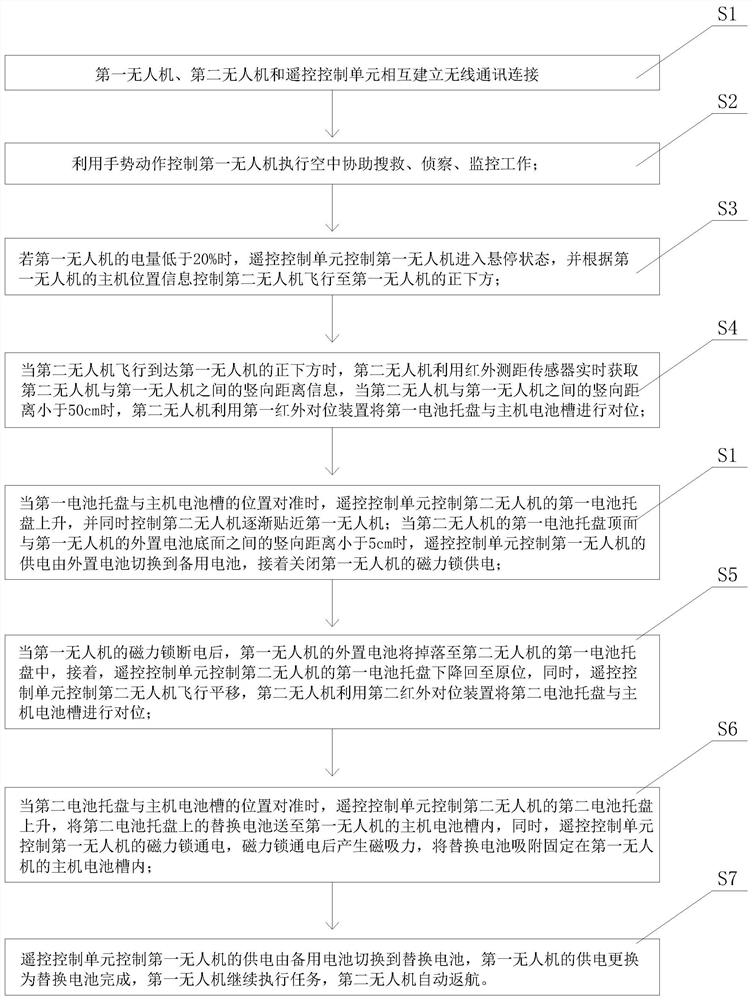
[0067] see Figure 1 to Figure 11 As shown in the figure, the control method for the air-replacement battery fire rescue unmanned aerial vehicle system provided by the present invention includes the following steps:
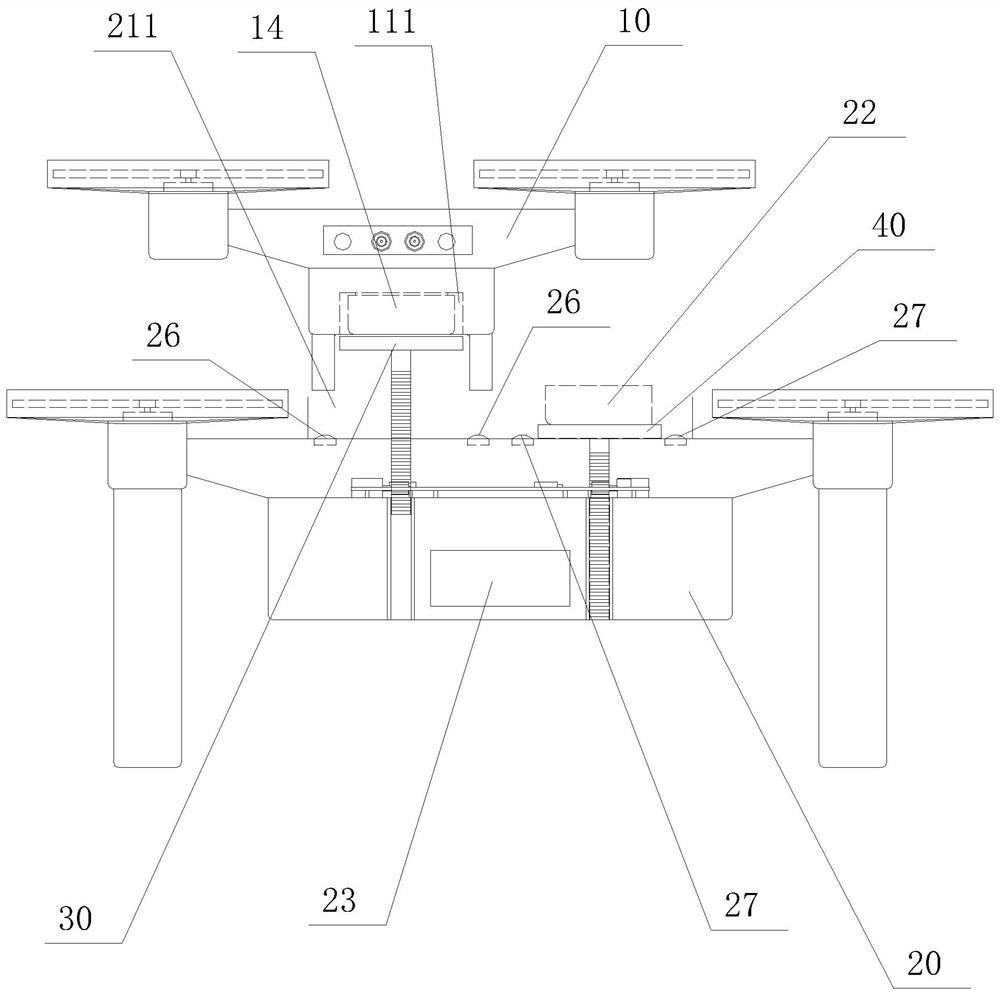
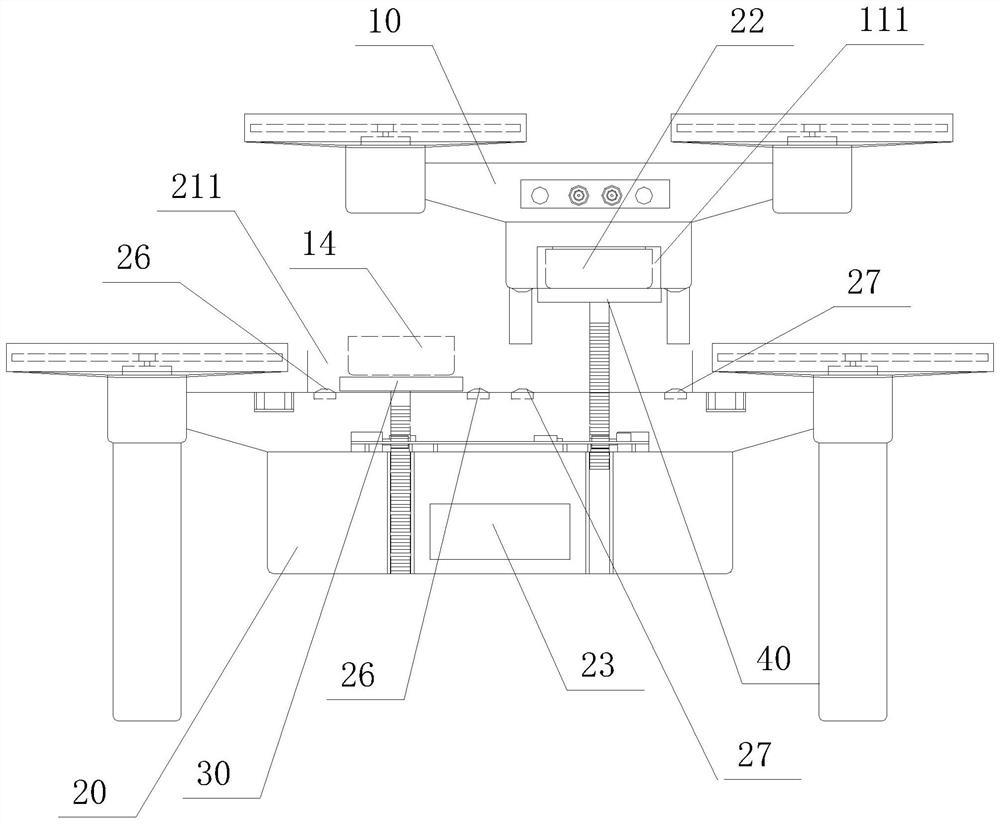
[0068] Step S1, pre-set an aerial battery replacement fire rescue drone system, the aerial battery replacement fire rescue drone system includes a first drone 10, a second drone 20, a remote control unit, a first drone 10, a second drone 20, and a remote control unit that are connected to each other in communication. The drone 10 includes a host body 11 , an external battery 14 , a backup battery 15 , a first GPS module 13 , a magnetic lock 18 , a gesture recognition control mechanism 12 , a gesture recognition control mechanism 12 , a magnetic lock 18 , and a first GPS module 13 , the backup battery 15 is respectively installed on the main body 11, the bottom of the main body 11 is provided with a main battery slot 111, and the external battery 14 is magneticall...
Embodiment 2
[0084] The air-replacement battery fire rescue drone system and its control method provided in Embodiment 2 of the present invention are basically the same as those in Embodiment 1, except that the first drone 10 further includes a high-definition camera 16, a three-axis automatic The gimbal 17 is stabilized, and the high-definition camera 16 is installed on the bottom of the host body 11 through the three-axis self-stabilizing gimbal 17, and the gesture recognition control mechanism 12 includes a first radar chip 122; The control method of the computer system, on the basis of Embodiment 1, step S2 also includes the following steps:
[0085] Step S21, the gesture recognition control mechanism 12 uses the first radar chip 122 to transmit the microwave radar signal to a preset range in real time, and receives the radar echo signal reflected by the hand, so as to obtain the target gesture 3D point cloud data, the gesture 3D point The cloud data includes the three-dimensional coor...
Embodiment 3
[0095] The air-replacement battery fire rescue drone system and its control method provided in Embodiment 3 of the present invention are basically the same as those in Embodiment 2, except that the first drone 10 further includes a flight controller 191, which controls the The device 191 is installed in the installation cavity of the first device and is electrically connected to the gesture recognition control mechanism 12. The flight controller 191 selects the flight action control of the drone body and the control of the high-definition camera 16 according to the control instructions sent by the gesture recognition control mechanism 12. Shooting action control; the control method for the aerial battery replacement fire rescue drone system provided by this embodiment, on the basis of Embodiment 2, the gesture sample learning in step S25 includes the following steps:
[0096] Step S251, using the first radar chip 122 to collect training data for gestures;
[0097] Step S252, p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More