

Robot visual system in all dimensions based on general serial bus
A universal serial bus, vision system technology, applied in the field of robot full-dimensional vision system, can solve the problems of processing and installation of blind spots, unsuitable for vibration environment, large image distortion, etc., to enhance practicability and adaptability, reduce complexity Degree and cost, the effect of low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
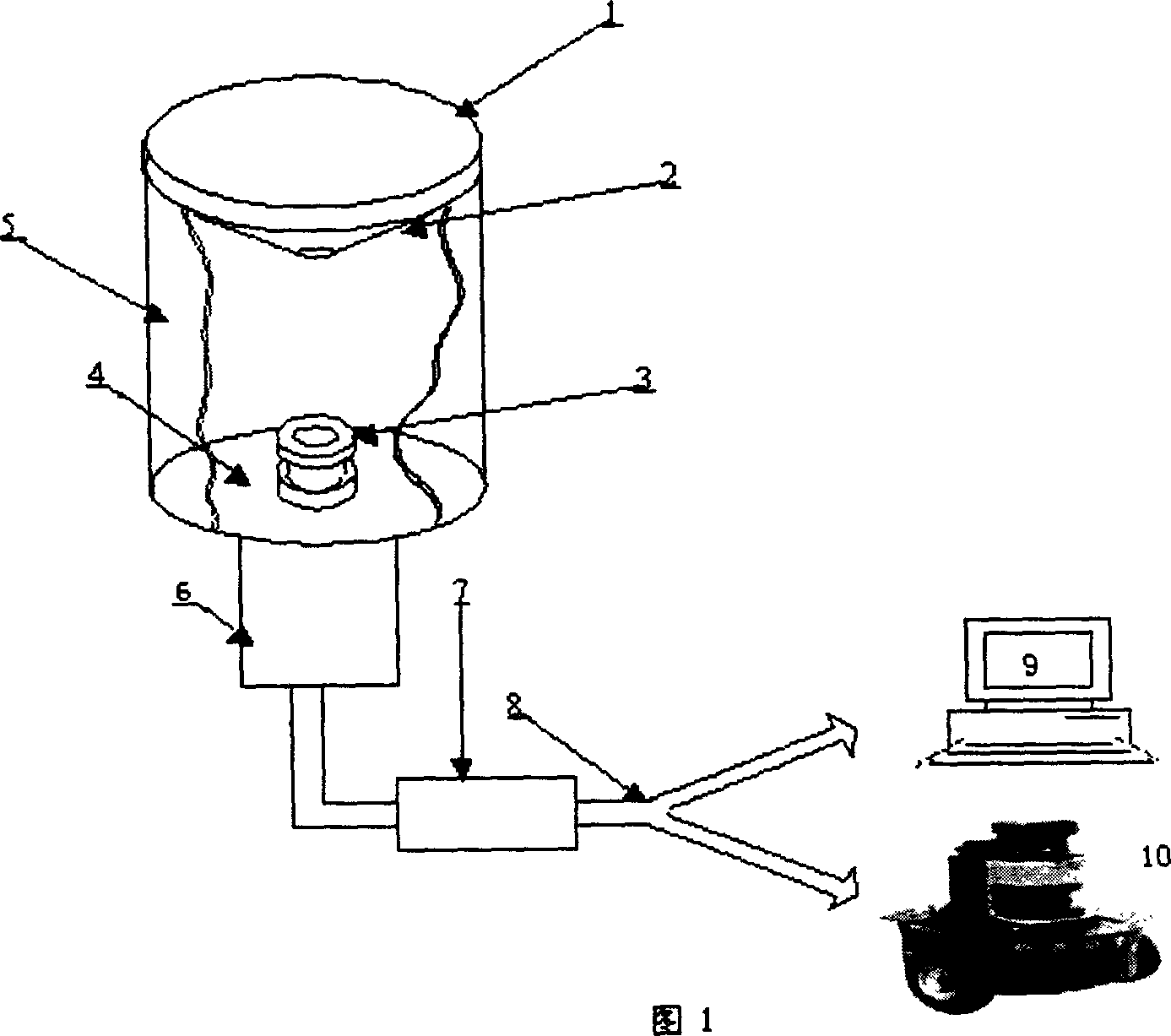
[0020] Accompanying drawing 1 is the structure schematic diagram after the whole device of the present invention is assembled. As shown in Figure 1, the top cover 1 and the viewfinder 2 are connected by fastening screws, and are integrally clamped on the protective cover 5, and the protective cover 5 is installed on the base 4, and the base 4 has a positioning hole that can allow the lens 3 to pass through , let the lens 3 extend into the protective cover 5 and face the tip of the viewfinder 2 , and the camera 6 is installed on the base 4 . The video signal of the camera 6 is connected to the USB image acquisition box 7, and connected to the background computer 9 or directly connected to the host computer of the mobile robot 10 via the USB interface bus 8.
[0021] In order to further reduce the blind area and improve the precision of the ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More