

Critical field force inducing operation controller
A technology of controller and potentiometer, which is applied in the direction of adaptive control, mechanical pressure/force control, general control system, etc., can solve problems such as failure to meet requirements, and achieve the effect of less debugging work, light weight and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in detail below in conjunction with each figure:
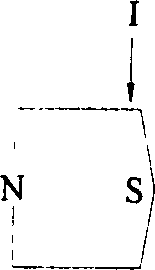
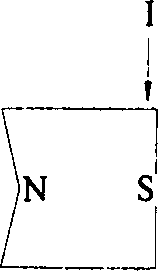
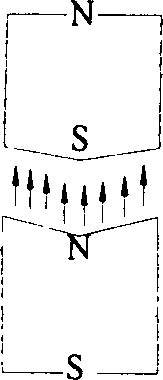
[0037] The present invention is made up of following main parts, and the frame mechanism f (1) of this device is installed on the swing lever L (2) of the front end of the upper wall of the frame mechanism in the form of a movable shaft. This swing lever can be as Figure 9Swing in the direction shown, the range of motion is not less than 40 degrees. There is a finger collar O (3) at the lower end of this swing bar, which is used for operator's finger operation. A rectangular coil frame K0 (4) with a cylindrical surface shape is fixedly installed in the central part of the swing rod, and enameled wire is wound on the coil frame to form a moving coil L0 (5), which moves together with the swing rod. On the left side of the swing rod, two magnetic poles M1 (6) and M2 (7) are installed according to a certain inclination, wherein M1 is located at the top and M2 is located at the bottom; co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More