

Container dock management method and system
A management method and container technology, applied in the field of container terminal management and its system, can solve the problems of high resource consumption, low operation efficiency, low mechanical utilization rate, etc., achieve multiple economic benefits and improve loading and unloading efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
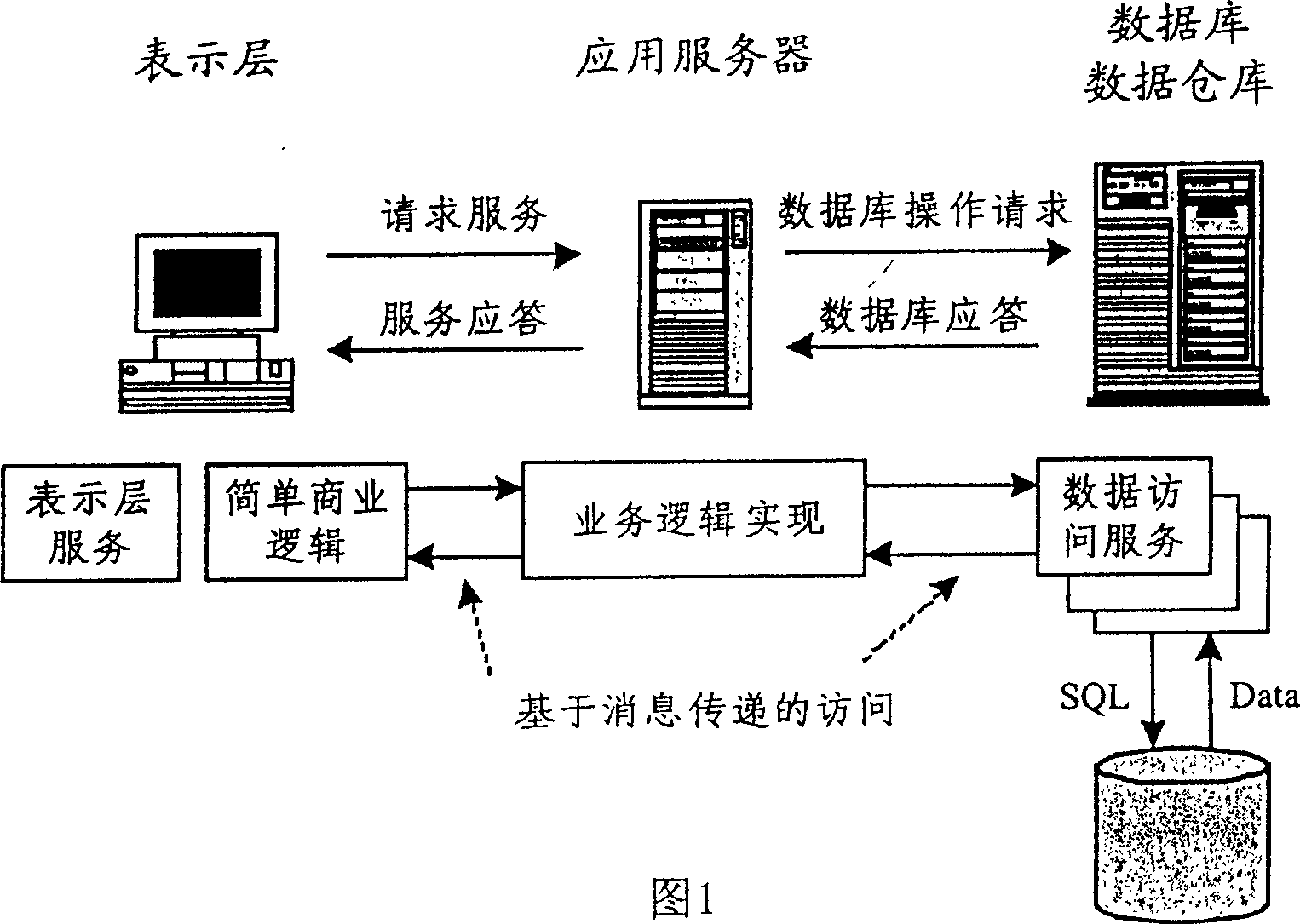
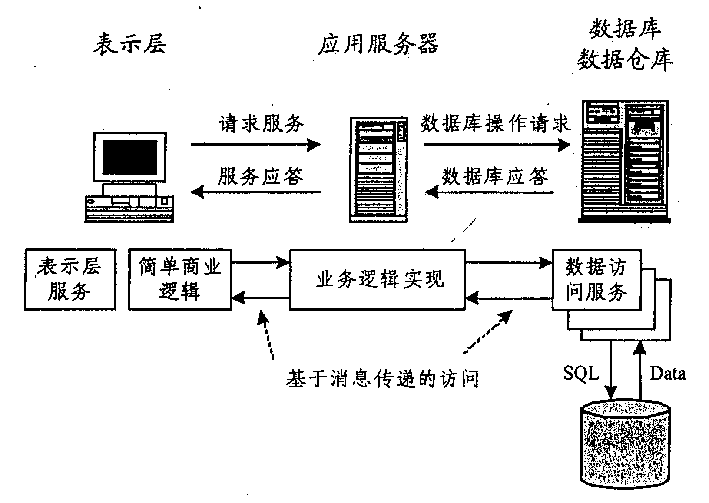
[0016] Below in conjunction with accompanying drawing 1, the present invention is described in further detail: a kind of container terminal management method, comprises the following steps: (a) the straight line length of the collection truck in different container areas is converted into distance point measurement through nonlinear scale transformation, and the distance Carry out fuzzy segmentation, establish corresponding distance discourse domain, distance fuzzy set, distance fuzzy set membership function, the expression of described distance point measure is: N = Δ 10 * | i A - i B | + | j A - j B | + | k A - k B ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More