

High precision flexible parallel robot with six degreed of freedom and large travel
A large-stroke, high-precision technology, applied in the field of parallel high-precision position adjustment robots, can solve the problem of small movement range of the adjustment device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
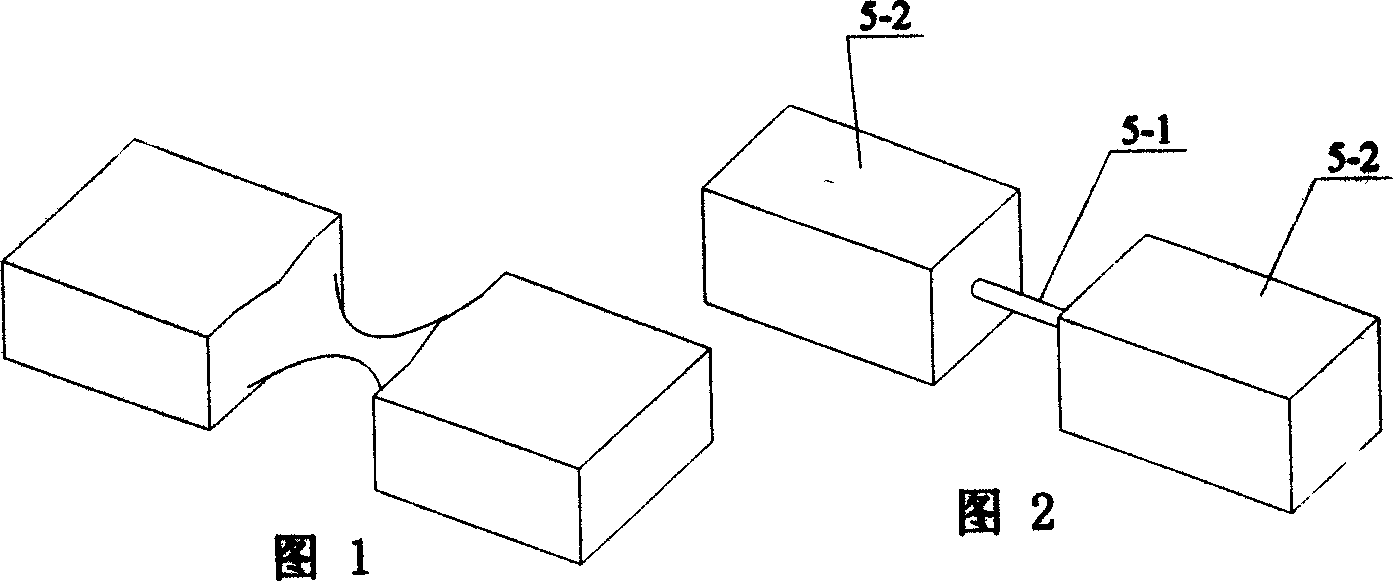
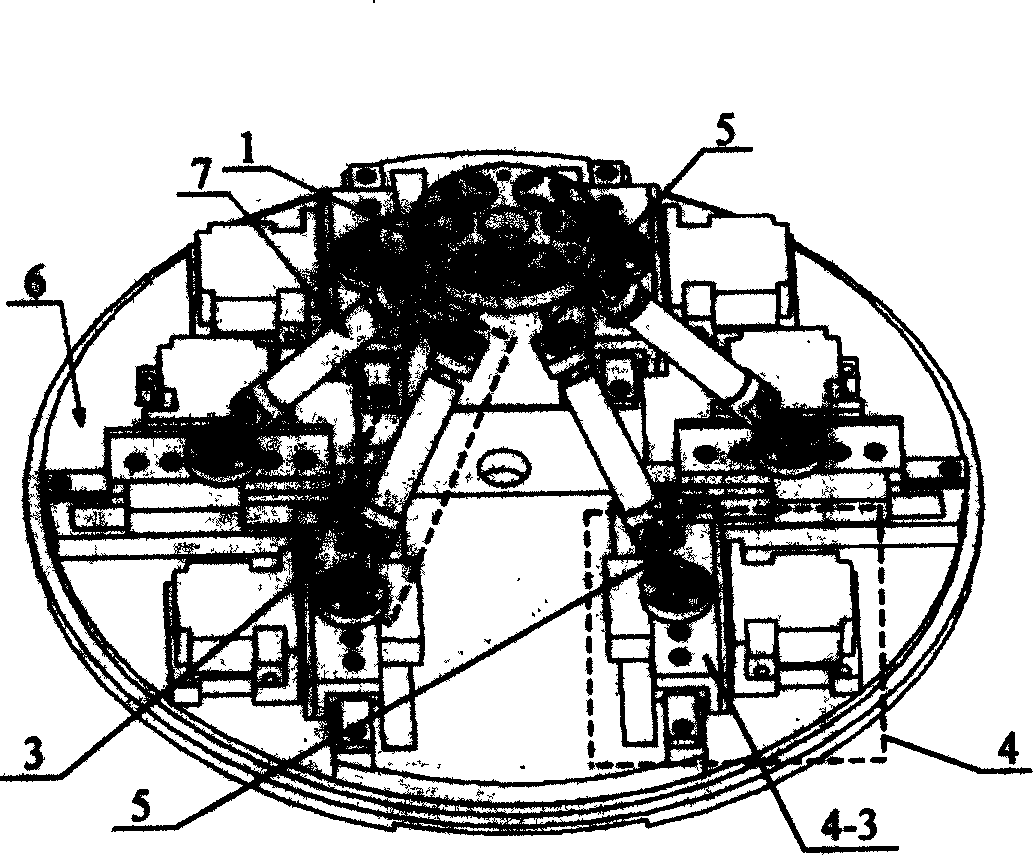
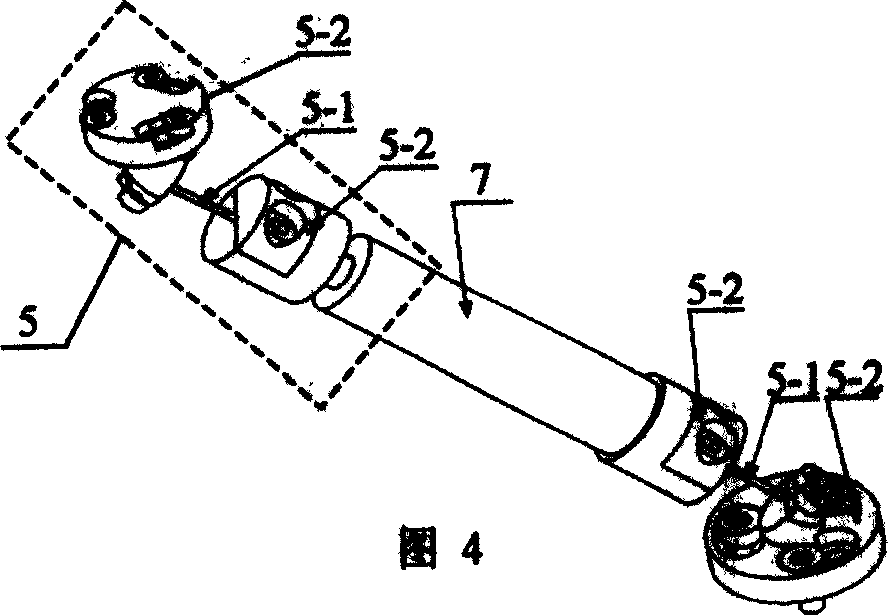
[0005] Specific implementation mode one: the following combination image 3 This embodiment will be specifically described with FIG. 4 . It consists of an upper platform 1, six sets of identical branch chains 3, six sets of identical driving devices 4 and a base 6, the branch chains 3 are evenly arranged between the upper platform 1 and the base 6, and the driving device 4 is set on the base 6, the branch chain 3 is composed of a rigid rod 7 and a large-stroke flexible hinge 5, the large-stroke flexible hinge 5 at the upper end of the branch chain 3 is connected to the upper platform 1, and the large-stroke flexible hinge 5 at the lower end of the branch chain 3 is connected to the driving device 4 Above, the large-stroke flexible hinge 5 is composed of a hinge rod 5-1 and fasteners 5-2 located at both ends of the hinge rod 5-1.
specific Embodiment approach 2
[0006] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the hinge rod 5-1 is made of beryllium bronze with a diameter of 0.8-1.2 mm and a length of 10-14 mm.
specific Embodiment approach 3
[0007] Specific implementation mode three: the following combination image 3 , Figure 5 , Figure 6 and Figure 7 This embodiment will be specifically described. The difference between this embodiment and the first embodiment is that the driving device 4 consists of a piezoelectric motor 4-1, a guide rail 4-2, a slide table 4-3, a slider 4-5, a rolling body 4-6 and a friction belt 4- 4 components, the guide rail 4-2 is set on the upper surface of the base 6 in the horizontal direction, the guide rail 4-2, the slider 4-5 and the rolling element 4-6 form a linear movement pair, and the slide table 4-3 is fixedly connected to the slider On 4-5, the sliding table 4-3 is fixedly connected to the lower end of the large-stroke flexible hinge 5, and the side surface of the sliding table 4-3 is bonded with a friction belt 4-4 in the horizontal direction, and the friction finger 4 of the piezoelectric motor 4-1 -1-1 is pressed against the surface of the friction belt 4-4. The drivin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More