

Measuring device and method for spatial pose of rigid body
A technology of pose measurement and measurement device, applied in the field of measurement and control, can solve problems such as increased cost and poor real-time performance, and achieve the effects of improved measurement accuracy, low cost, and high system real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The method and device for measuring the pose of a motion rigid body according to the present invention will be specifically described in conjunction with the accompanying drawings.
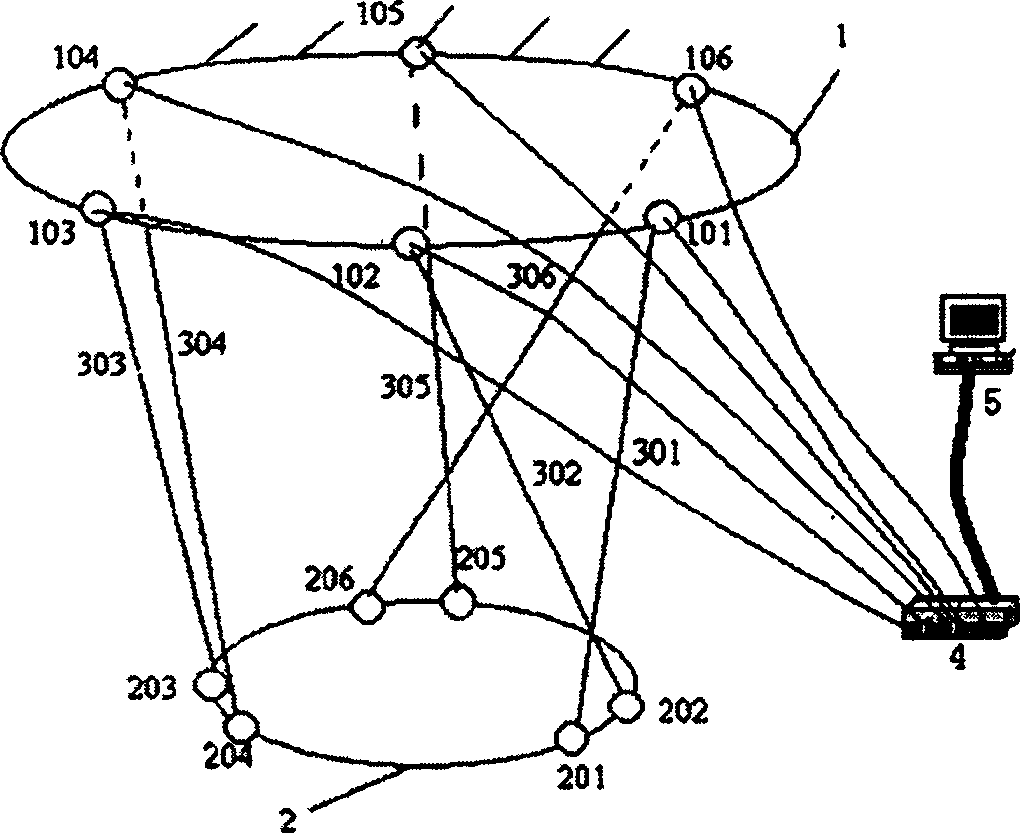
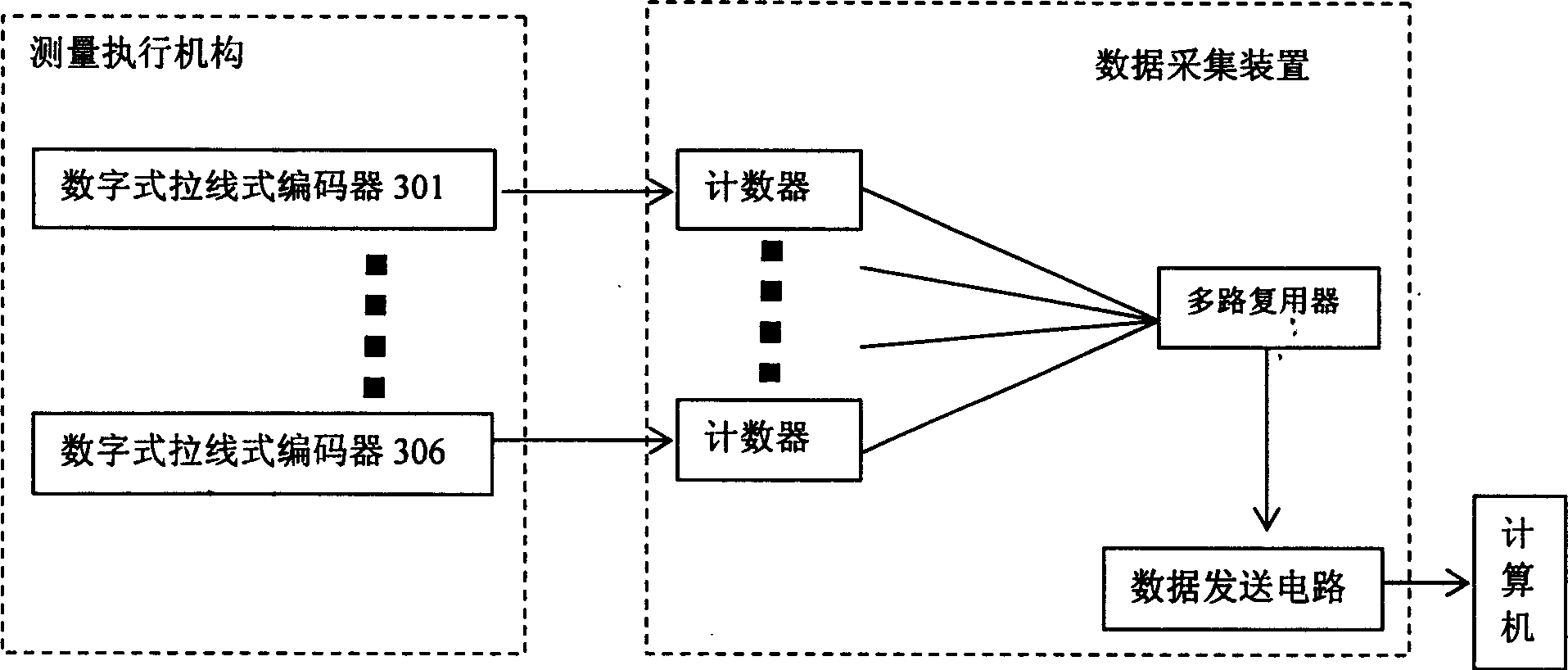
[0034] Such as figure 1 As mentioned above, the rigid body space pose measurement device of the present invention includes a measurement actuator, a data acquisition device, and a computer storing a calculation program; the measurement actuator includes a fixed platform 1, and six spherical joints 101- 106; motion platform 2, six ball hinges 201-206 installed on the motion platform; cable-pull encoders 301-306 correspondingly connecting ball hinges 101-106 and 201-206; The output end of the encoder is connected, and the output end of the data acquisition device 4 is connected with the corresponding input port of the computer 5 .
[0035] The fixed platform 1 is used to install six spherical joints 101-106, so that the position of the spherical joints is fixed, a fixed fixed platform coordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More