

Plate spring skeleton hydrulic pneumatic flexible bending joint
A bending joint, hydro-pneumatic technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of high manufacturing cost, complex structure, insensitive response, etc., and achieve high dynamic control accuracy, small fluid flow, and good coordination. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below the present invention will be further described in conjunction with the implementation of scheme I in the accompanying drawings:
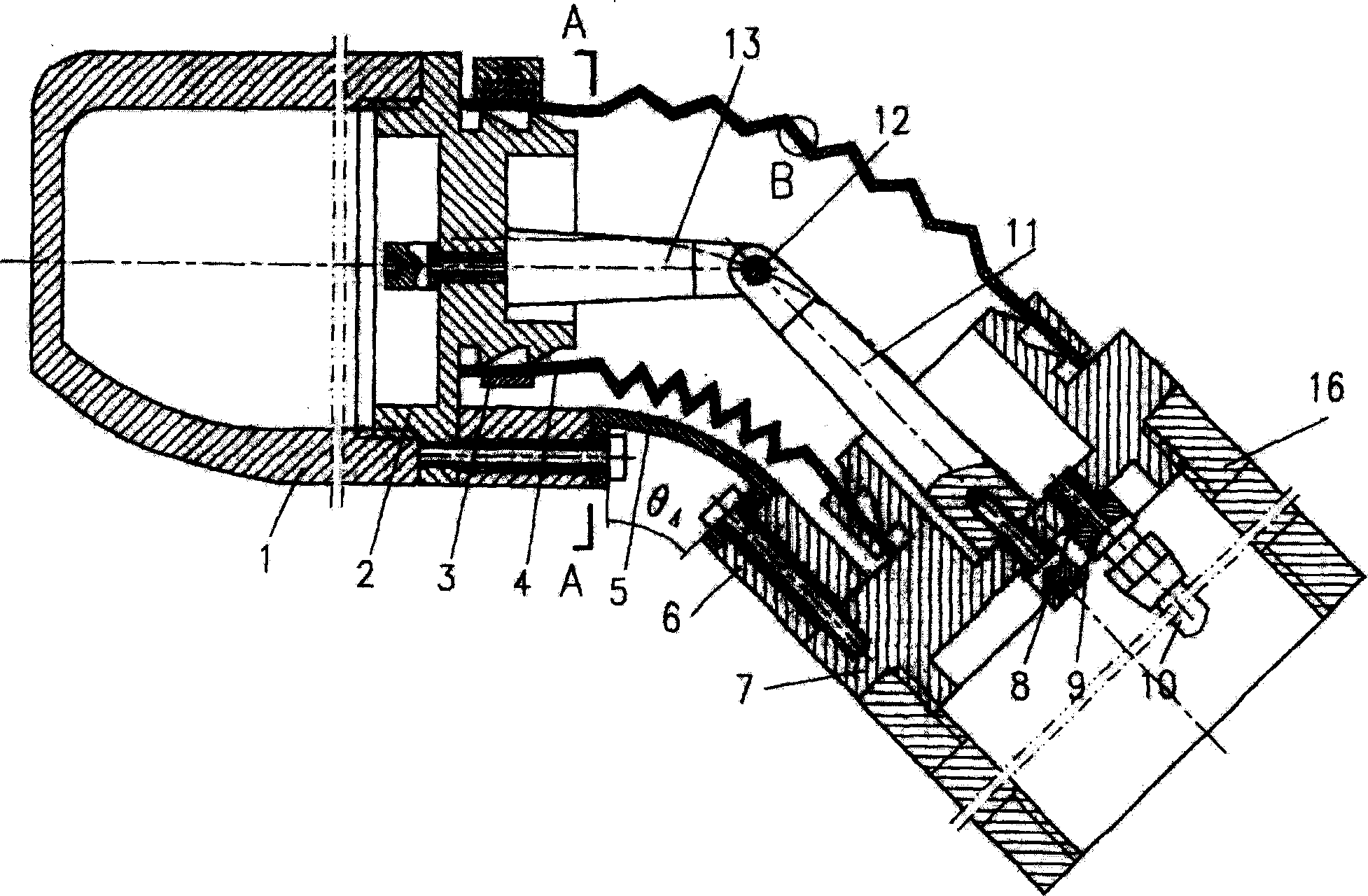
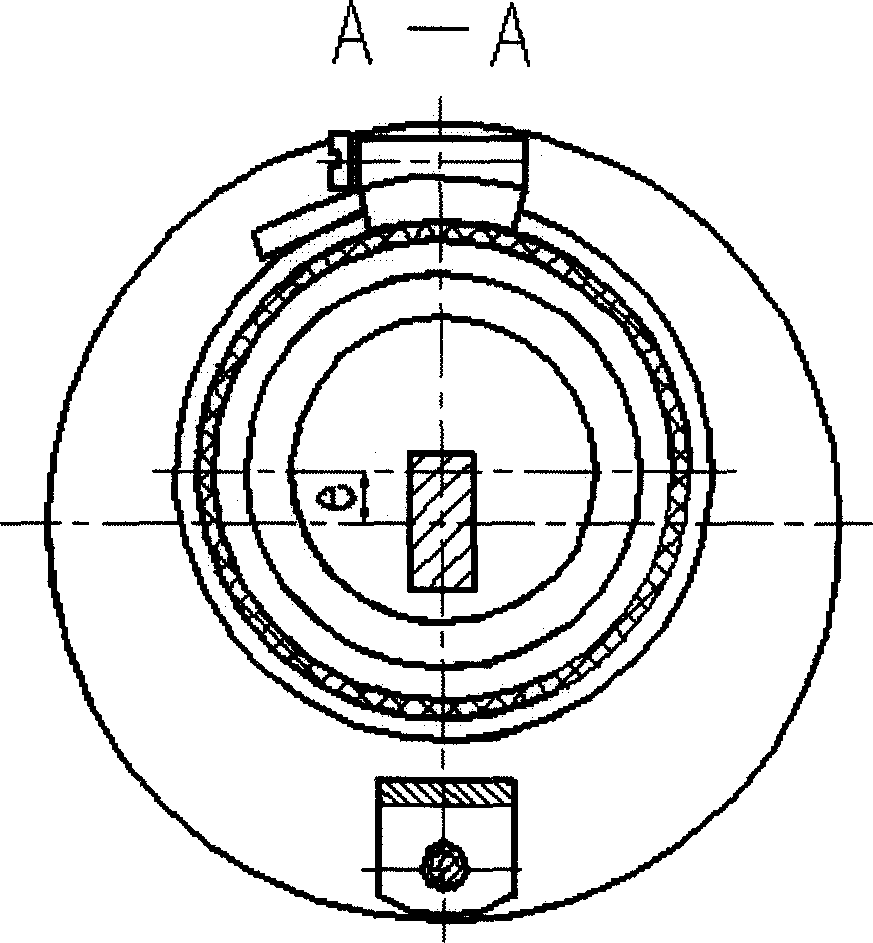
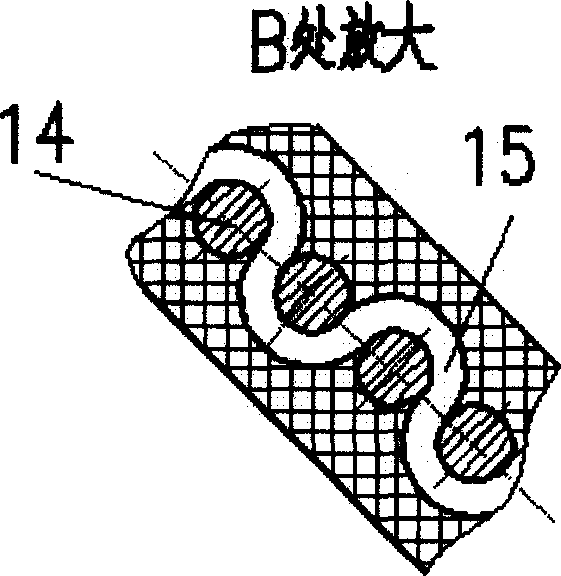
[0021] The joints of plan I are mainly composed of head section 1, head seat 2, clamp 3, wave shell elastic body 4, plate spring 5, cushion block 6, tail stock 7, gasket 8, pipe joint 9, hose 10, long hinge seat 11. Hinge 12, short hinge seat 13, circular weft 14, winding warp 15, middle section 16, etc.
[0022] The wave shell elastic body 4 is clamped on the bayonet of the headstock 2 and the tailstock 7 by the clamp 3, and the two ends of the leaf spring 5 are fixed on the headstock 2 and the tailstock 7 through the pads 6; inside the joint, two The inner hex bolts pass through the gasket 8 respectively to fix the long hinge seat 11 and the short hinge seat 13 on the tailstock 7 and the headstock 2, and the long hinge seat 11 and the short hinge seat 13 are connected by a hinge 12; The headstock 2 is threaded, the middle section 16...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More