

Six freedom visual tracking method and system based on micro machine parallel processing structure
A parallel processing and visual tracking technology, applied in the field of visual tracking, can solve problems such as large amount of calculation, high cost, and increased calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
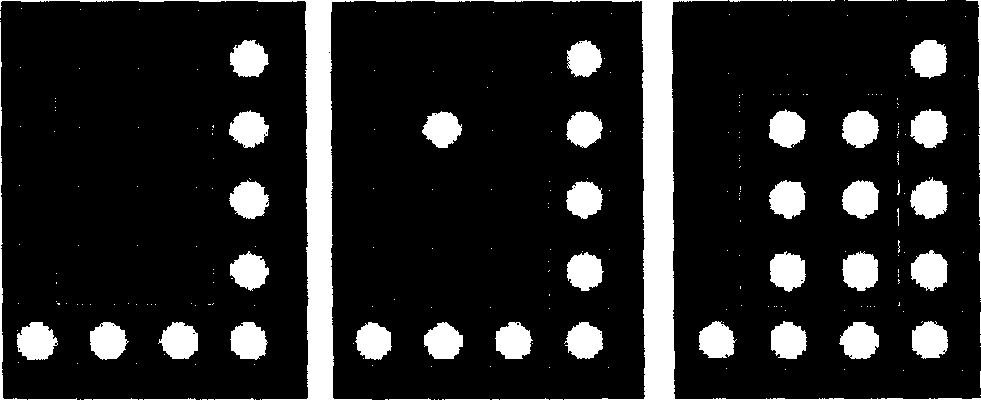
[0102] A preferred embodiment of the present invention is: see Figure 10 , the six-degree-of-freedom visual tracking method based on the microcomputer parallel processing structure, the system adopted includes two microcomputers (microcomputer 0 and microcomputer 1), namely N; two sets of image acquisition subsystems (including cameras 0 and 1, and installed in image acquisition card in microcomputer 0, 1); two network communication cards; a network switch; artificial signs: coplanar dot matrix patterns such as figure 1 shown.
[0103] Two microcomputers:
[0104] The three processes of this system run on two microcomputers on the same local area network (LAN). Processes 0 and 2 run on microcomputer 0, and process 1 runs on microcomputer 1.
[0105] Two sets of image acquisition subsystems:
[0106] Adopted two cameras in the image acquisition subsystem in the present embodiment, two image acquisition cards, they are installed on two microcomputers respectively, two camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More