

Visual quick identifying method for football robot
A football robot and recognition method technology, applied in character and pattern recognition, instruments, computer components, etc., can solve problems affecting recognition speed, inaccurate robot position, robot position deviation, etc., and achieve fast search speed and high recognition accuracy , the effect of strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] A preferred example of the present invention is described in detail as follows in conjunction with accompanying drawing:
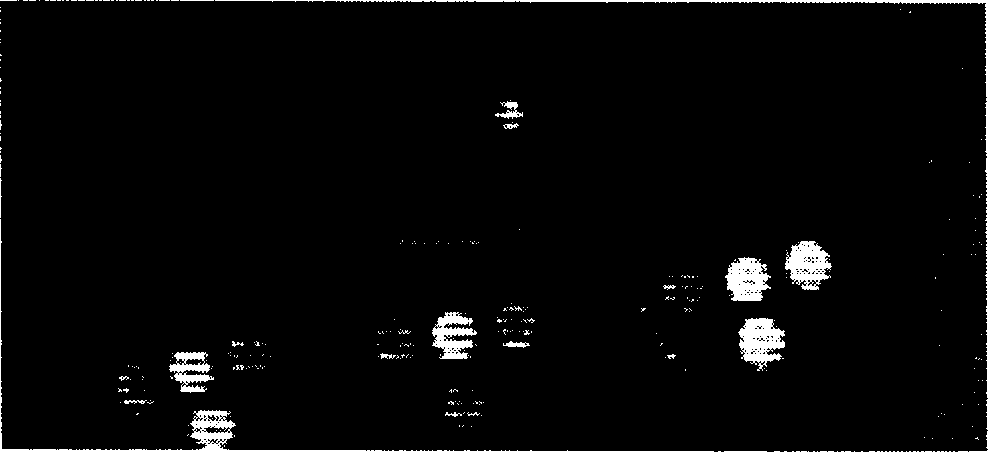
[0060] The football robot vision fast recognition method is implemented in the form of software, and it must be based on a series of hardware foundations. Its basic hardware equipment is a camera and a video capture card. The camera is installed above the field, and the shooting range must completely cover the field. The video capture card is installed on the workstation (it can be a PC), its input is connected to the output of the camera, and the output of the video capture card is digital image data. The present invention is to process and identify these data.
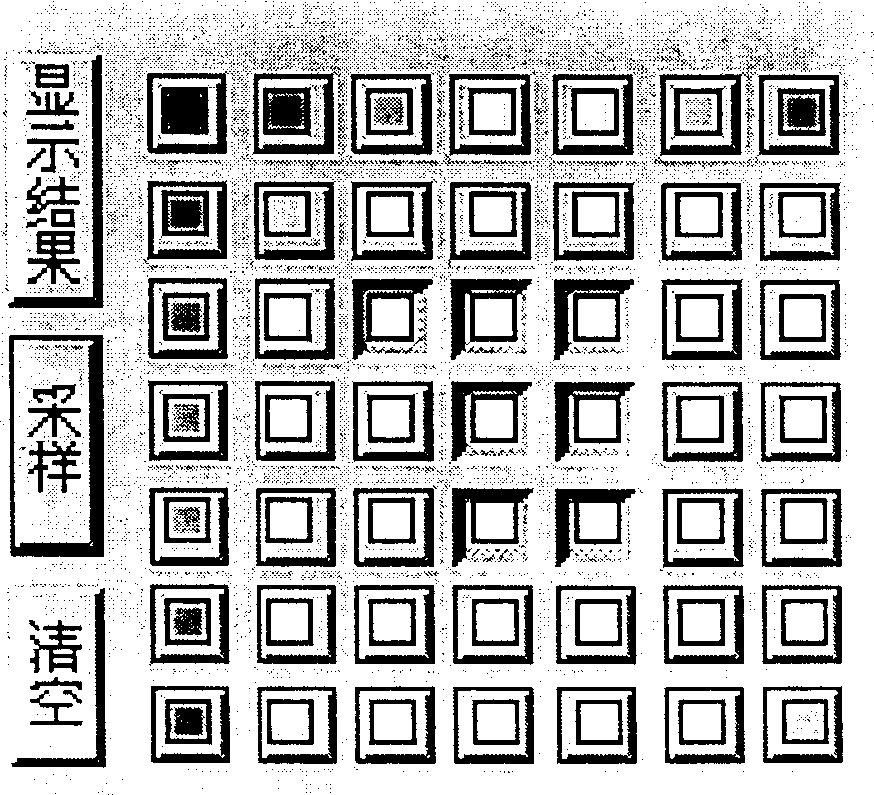
[0061] The program is realized by VC++MFC to determine the position of the goal and the sideline, and provide real-time data on the position, direction, speed and acceleration of the players on the field and the position of the ball.
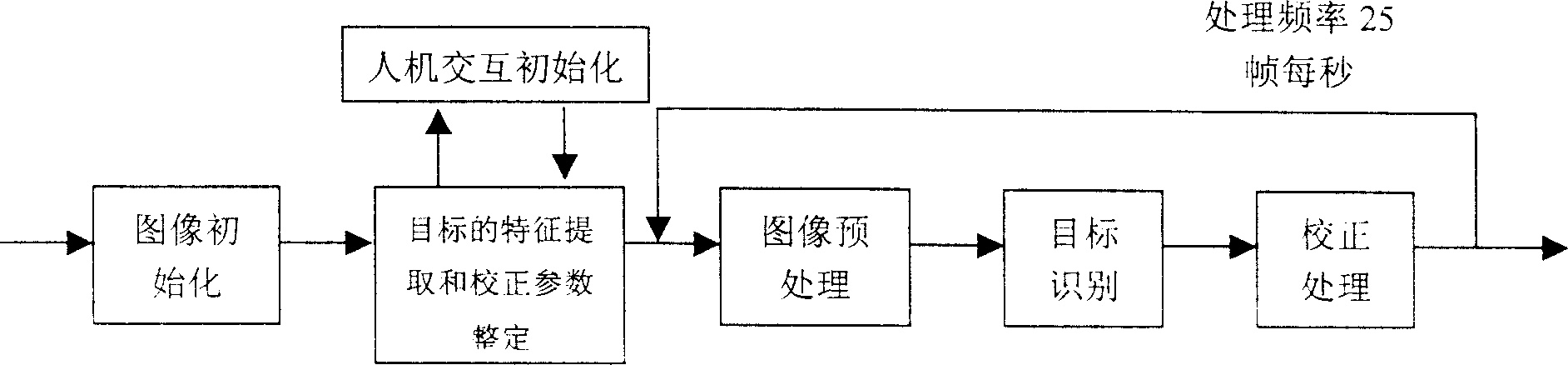
[0062] The workflow of this visual recognition metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More