

Three-branch chain six-freedom degree parallel flexible hinge micromotion mechanism
A technology of flexible hinges and degrees of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult assembly, complex structure, and large assembly errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described in more detail below in conjunction with accompanying drawing example:
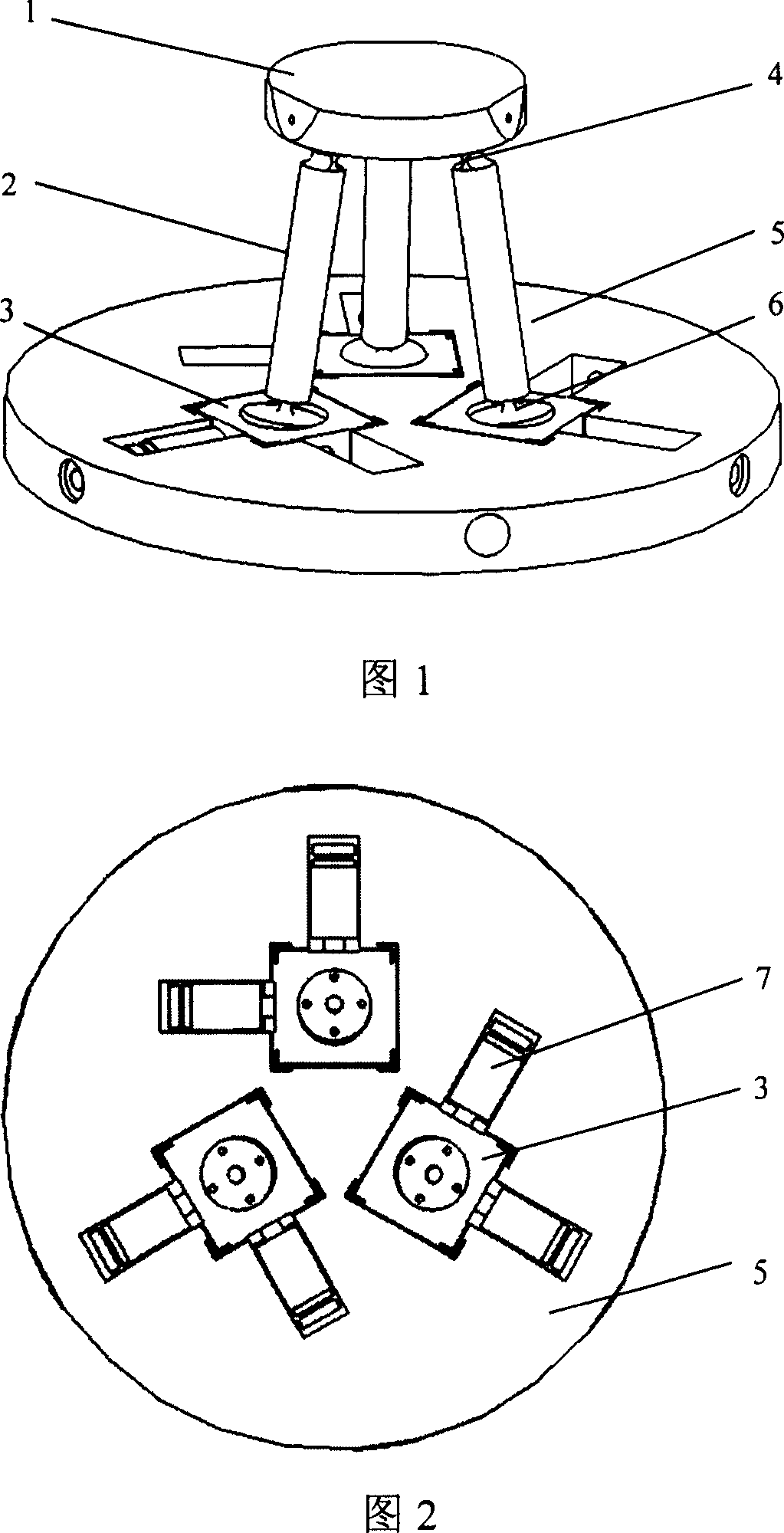
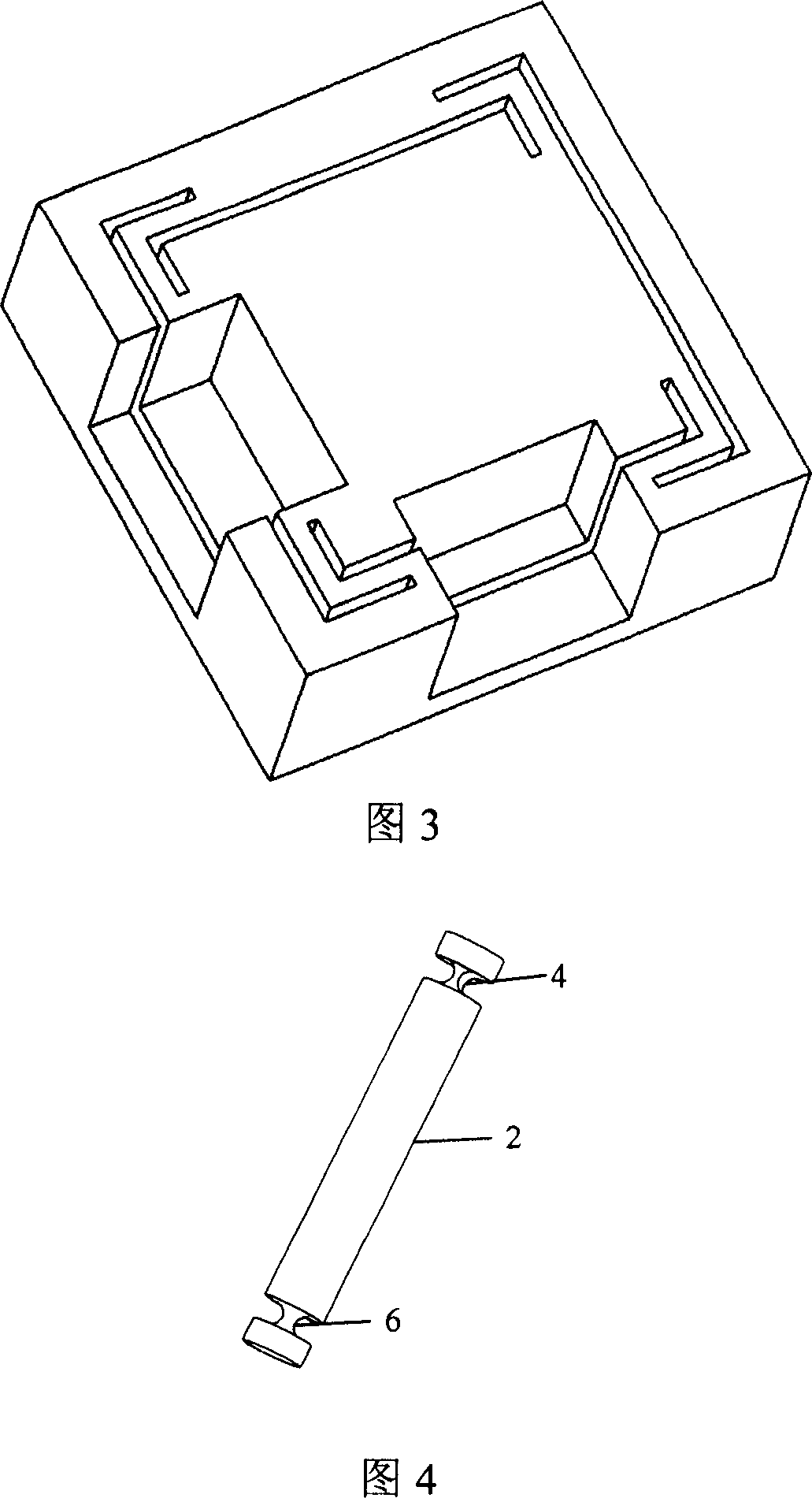
[0019] Referring to Fig. 1, the composition of the three-branched six-DOF parallel flexible hinge micro-motion mechanism includes a base platform 5, a moving platform 1, a drive unit set on the base platform, and three joints respectively connected to the drive unit and the moving platform through flexible hinge joints. a pole 2. Combined with Fig. 2 and Fig. 3 simultaneously, described driving unit comprises three elastic plates 3 installed on the base platform and piezoelectric ceramic drivers 7 connected with the elastic plates, two piezoelectric ceramic drivers are connected on each elastic plate, Two piezo drivers are arranged at right angles. At the same time combined with Figure 4, there are two types of flexible hinge joints at both ends of the pole: one is a flexible ball joint 6 between the pole and the elastic plate, and a flexible rotary hinge 4 betwe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More