

Vehicle routing and path planning
a technology for arranging and planning roads, applied in surveying and navigation, instruments, navigation instruments, etc., can solve the problems of reducing utility, less suited to reasoning about goals and sub-goals, and yet to develop automated plan generation strategies for achieving higher-level mission goals. , to achieve the effect of sufficient flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
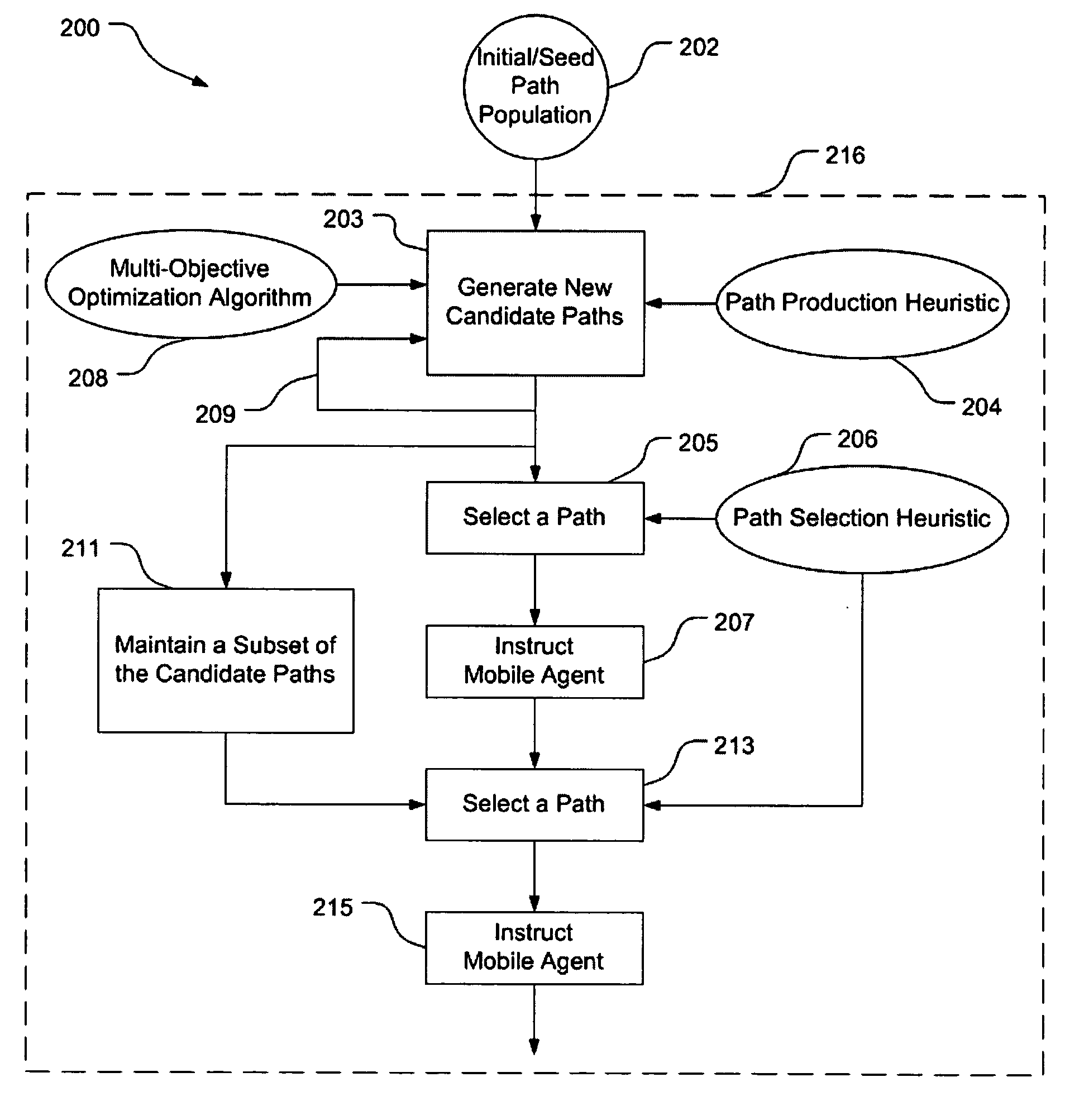
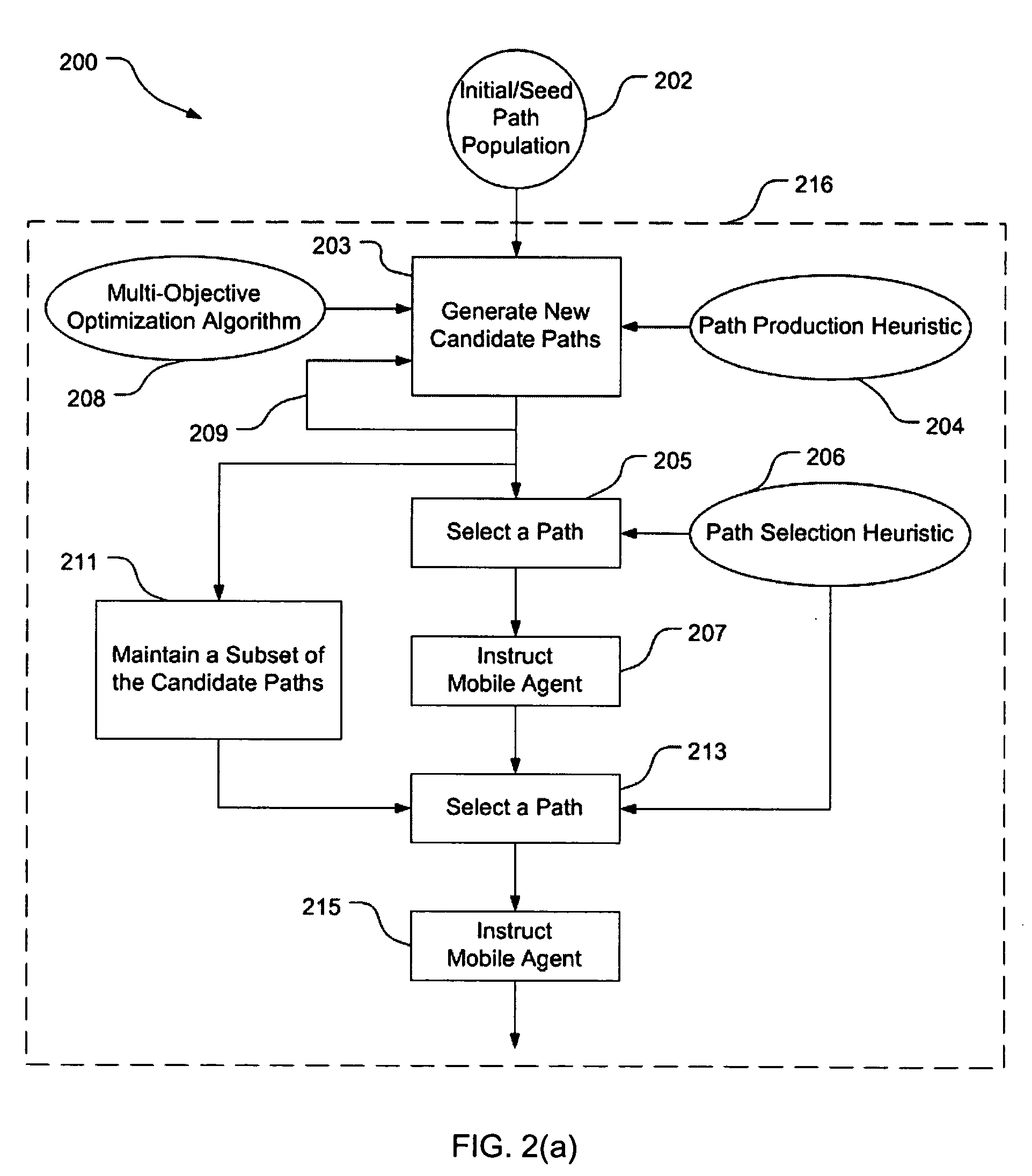
[0031] To provide an overall understanding, certain illustrative practices and embodiments will now be described, including a system and method for determining a path having an ordered set of waypoints to be visited by a mobile agent to accomplish a mission. In a typical embodiment, the mobile agent includes a vehicle, which may be manned or unmanned. For example, and without limitation, the vehicle may include a sea, ground, air, or space vehicle, or an amphibious vehicle capable of movement in, and across a boundary of, two or more terrain types (e.g., a sea-ground amphibious vehicle, an amphibious craft capable of traveling in and beyond a planet's atmosphere, etc.). The sea vehicle may be capable of movement on an aquatic surface region, subsurface region, or both. Analogously, a ground vehicle may be capable of movement underground, on a ground surface, or both.
[0032] In an alternative embodiment, the mobile agent includes a human (e.g., a soldier, a rescue worker, or another ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More