

Dual Arm Robot
a robot and arm technology, applied in the field of dual arm robots, can solve the problem that the robot cannot be used in a vacuum transport module built per semi-mesc standards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
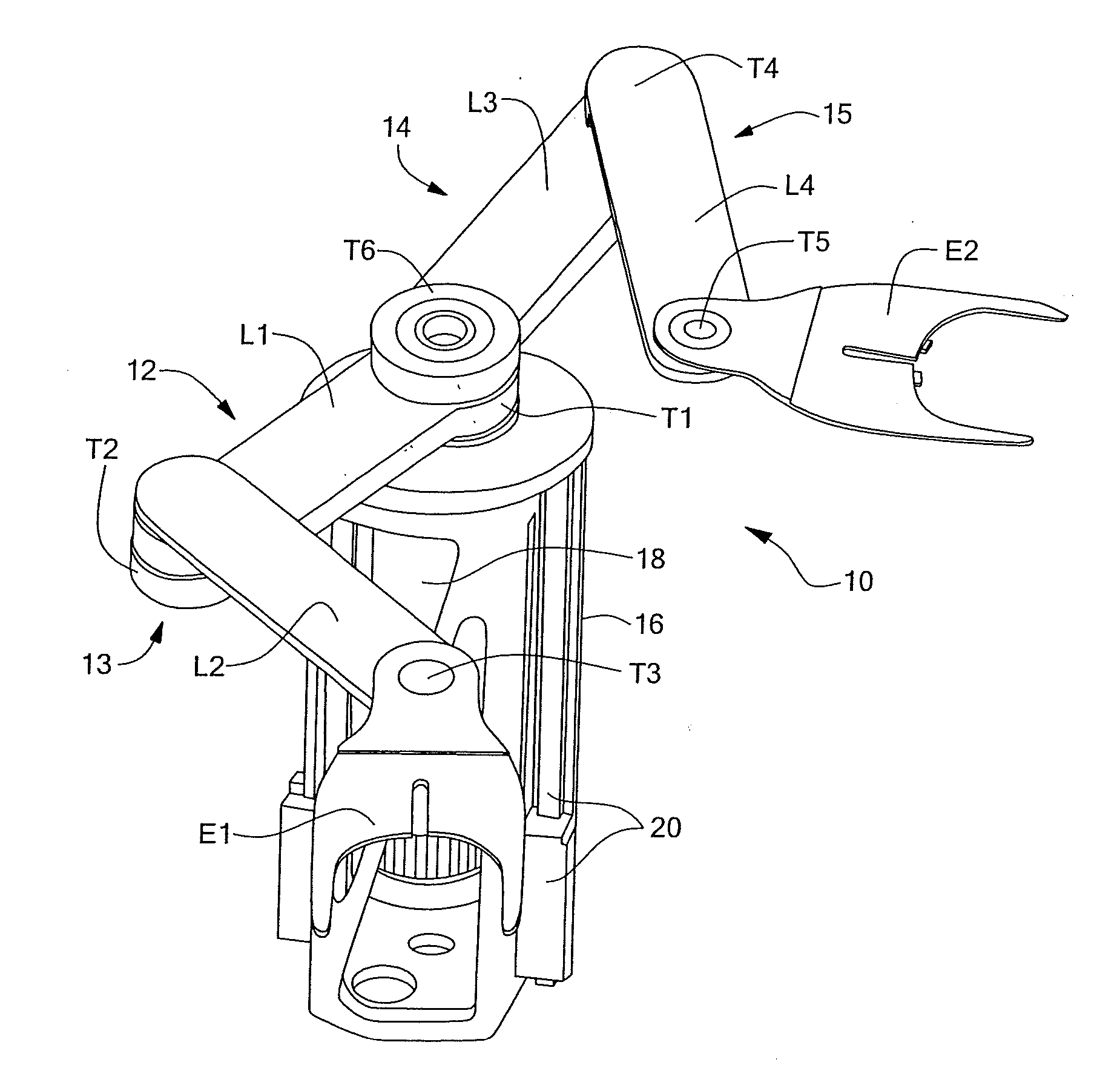
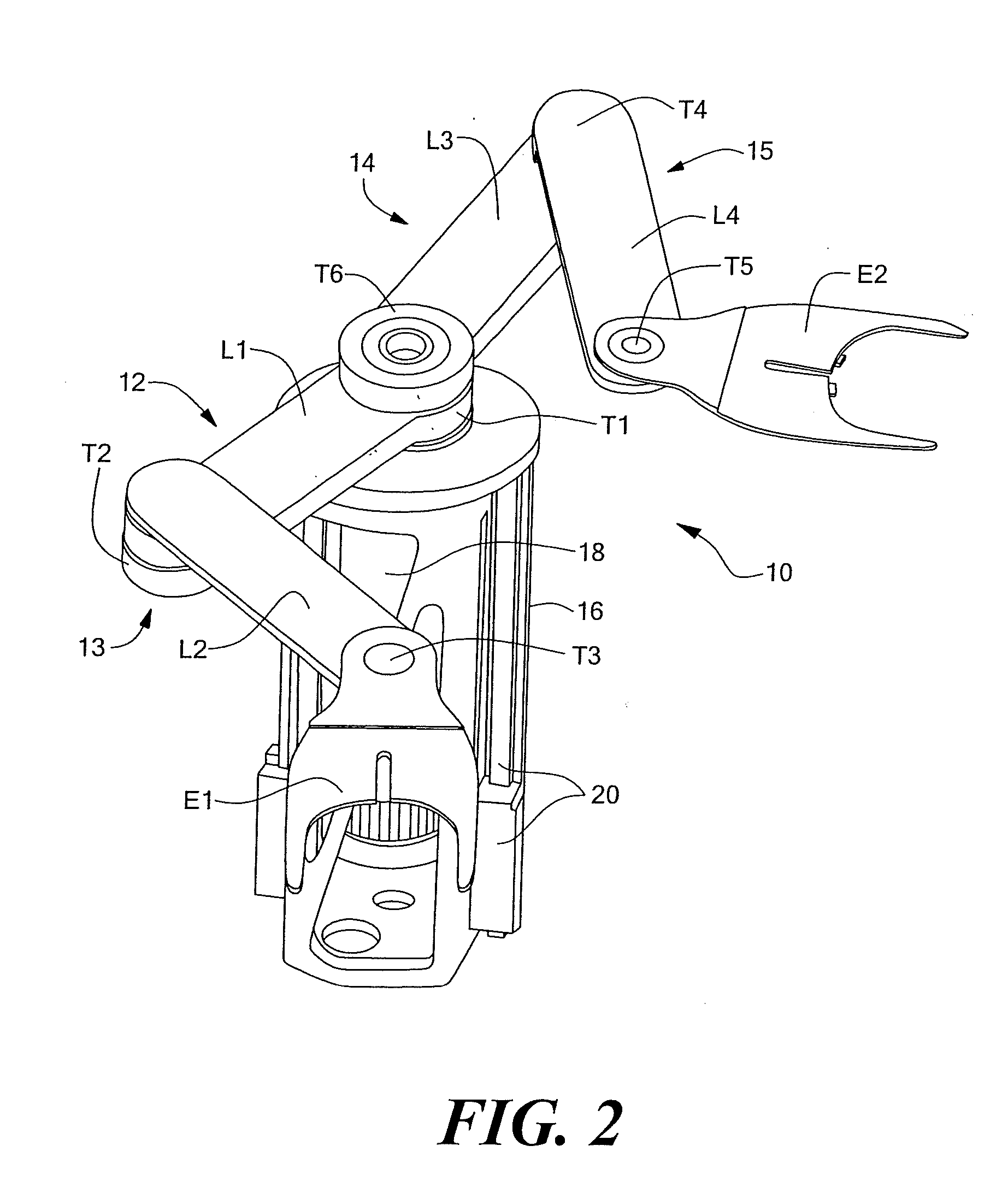
[0125]The present invention relates to a dual arm, cylindrical coordinate robot assembly, and more particularly to the manipulator, the system of links and joints that cooperate to position a pair of end effectors, for such a robot assembly.
[0126]For purposes of describing the present invention, the manipulator can be described as a mechanical assembly and broken down into major linkages, minor linkages (wrist components), and the end effector. The major linkages are the set of joint-link pairs that position the manipulator in space. Usually, the major linkages are the first three sets of joint-link pairs. The first joint-link pair includes a prismatic joint (e.g., a linear bearing) and a link (e.g., a carriage) that allows for vertical displacement of the tool. The second joint-link pair includes a revolute joint (e.g., a radial ball bearing) and a link (e.g., an inner link). The third joint-link pair includes a revolute joint (e.g., a radial ball bearing) and a link (e.g., an oute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More