

Tension control and counting derice
A tension control and counting device technology, applied in the field of robotics, can solve the control advantages without electro-hydraulic integration, affect the realization of automatic cable arranging, destroy the winding level and other problems, achieve high reliability, easy adjustment, protection from damage effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
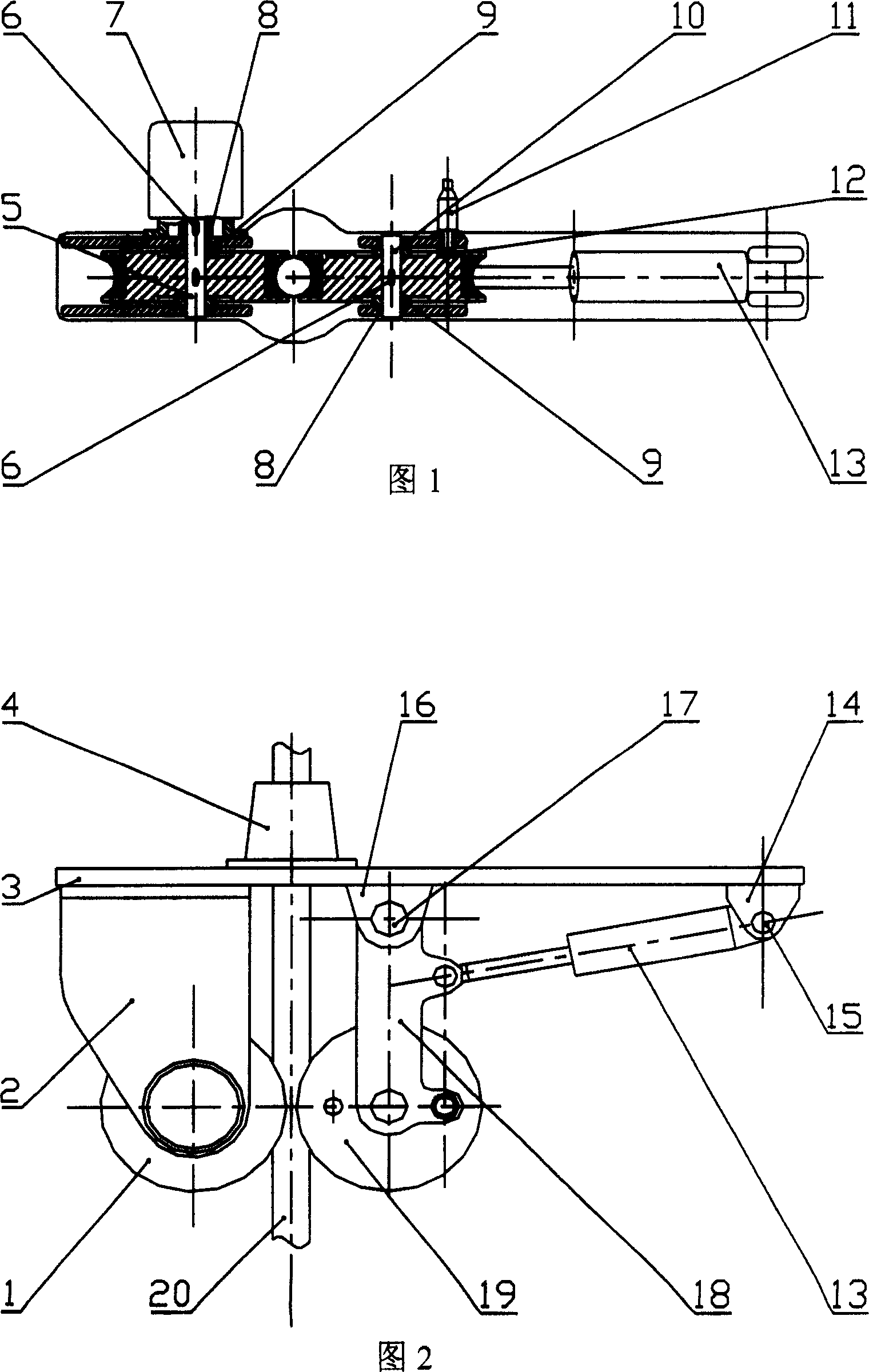
[0023] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
[0024] The invention consists of two parts: tension control and counting, wherein the tension control part is driven by hydraulic pressure and has two shaft systems, one is a driving wheel shaft system, and the other is a driven wheel shaft system, and the driving wheel shaft system is installed on a fixed support. On the support frame formed by connecting with the chassis, the driven wheel shaft is mounted on the swing support frame formed by the hinged connection between the rocker arm and the rocker arm support fixed on the chassis; the cable is always clamped to the driving wheel and the driven wheel Between them, and enter the cable winch through the guide cylinder; the extension end of the piston rod of the hydraulic cylinder is hinged with the rocker arm, and the tail end of the hydraulic cylinder is hinged with the tailstock of the hydraulic cyli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More