

Robot of autonomous moving along 110KV transmission line and its working method
A technology of robots and power lines, applied in the field of robots, can solve the problems of low efficiency of manual line inspection, high labor intensity, and high cost of helicopter line inspection, so as to improve work efficiency and detection accuracy, ensure safe operation, and reduce workload. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
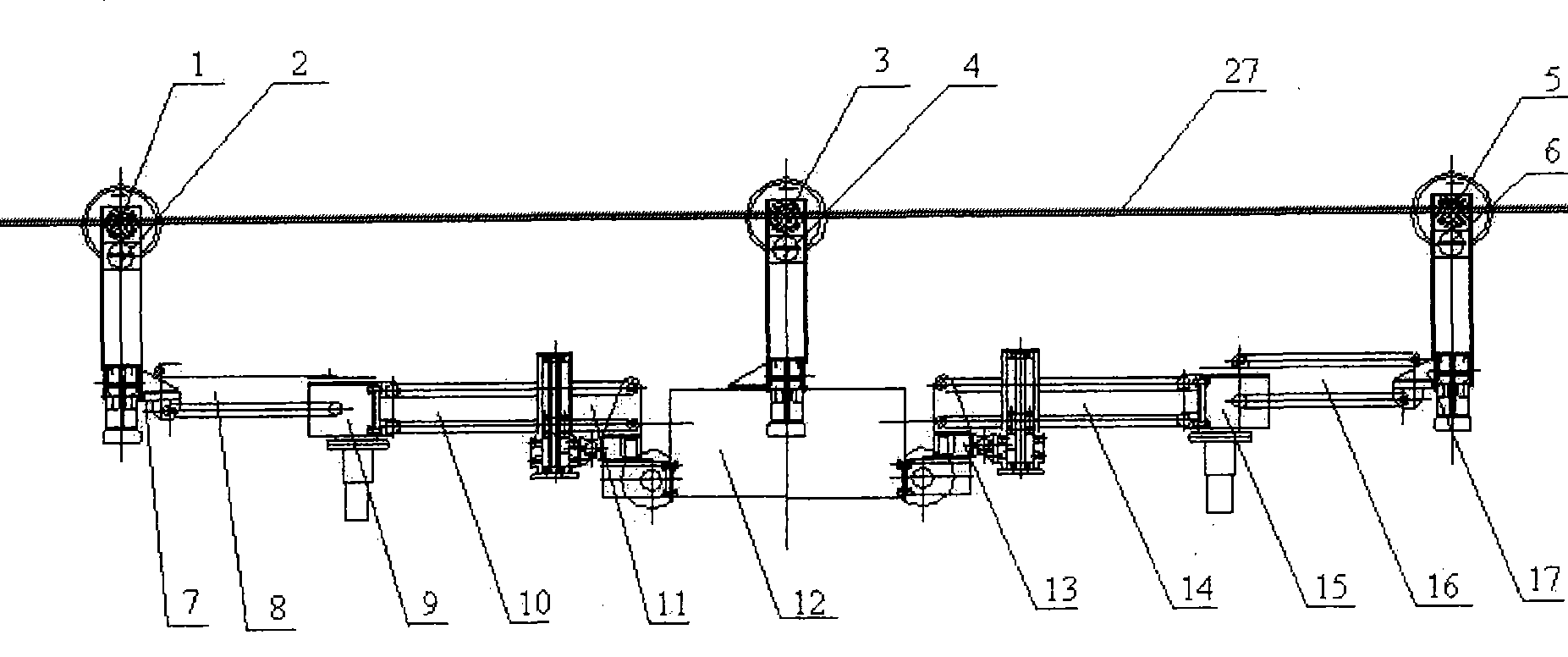
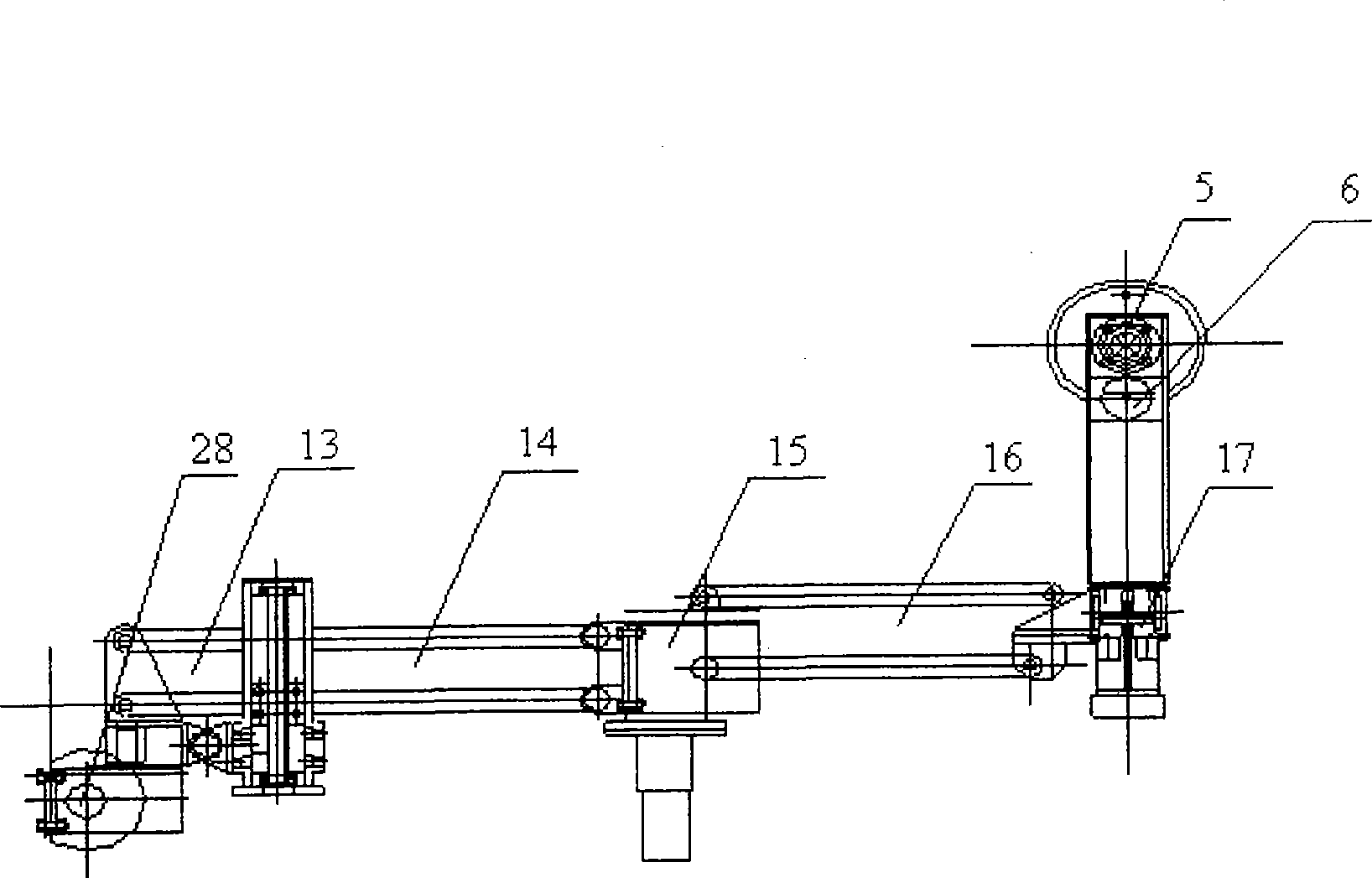
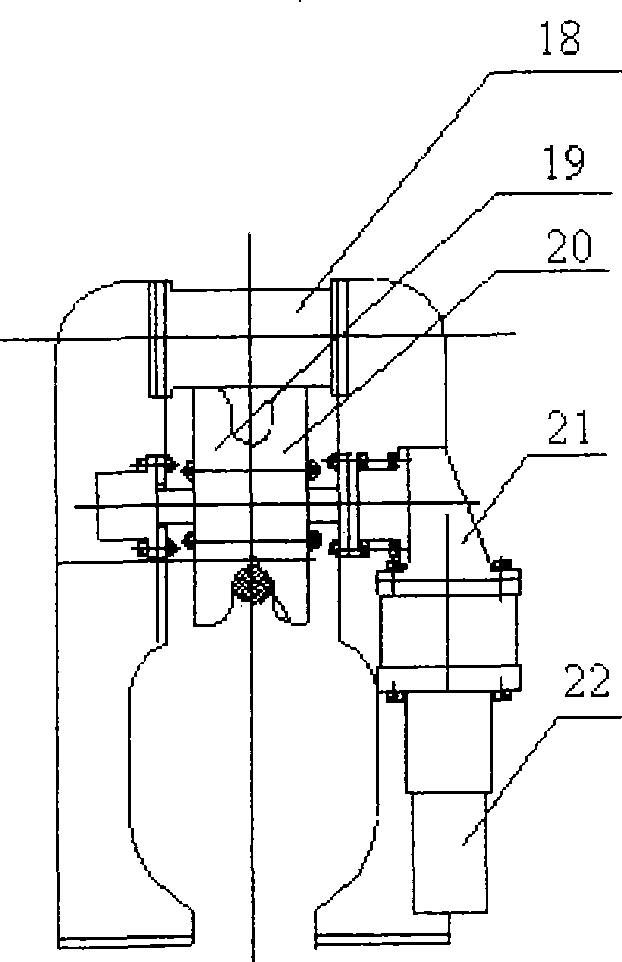
[0031] Embodiment: the structure of the present invention is as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5As shown, a robot that walks autonomously along a 110kV transmission line is composed of a robot body, a control device, a sensor, a detection device, and a wireless image transmission device; the control device and wireless image transmission device are installed in the control box 12 in the middle of the robot body, The position sensor is installed at the end of each joint motor of the robot, the ranging sensor and the visual sensor CCD for detecting obstacles are installed in front of each hand, and the detection device includes a camera and a thermal imager connected to the robot body through a pan / tilt.
[0032] Described robot body is made up of control box 12, flexible arm before and after, driving device 1,3,5, braking device 2,4,6, palm opening and closing device, as figure 1 shown. The front and rear flexible arms have the same structure and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More