

Under-actuated coupling transmission type imitation human finger mechanism
A transmission-type, under-actuated technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of difficulty in maintaining the shape of the grasp, slow speed of the grasped object, poor grasping accuracy, etc., to achieve stable grip, The effect of good movement coordination and smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
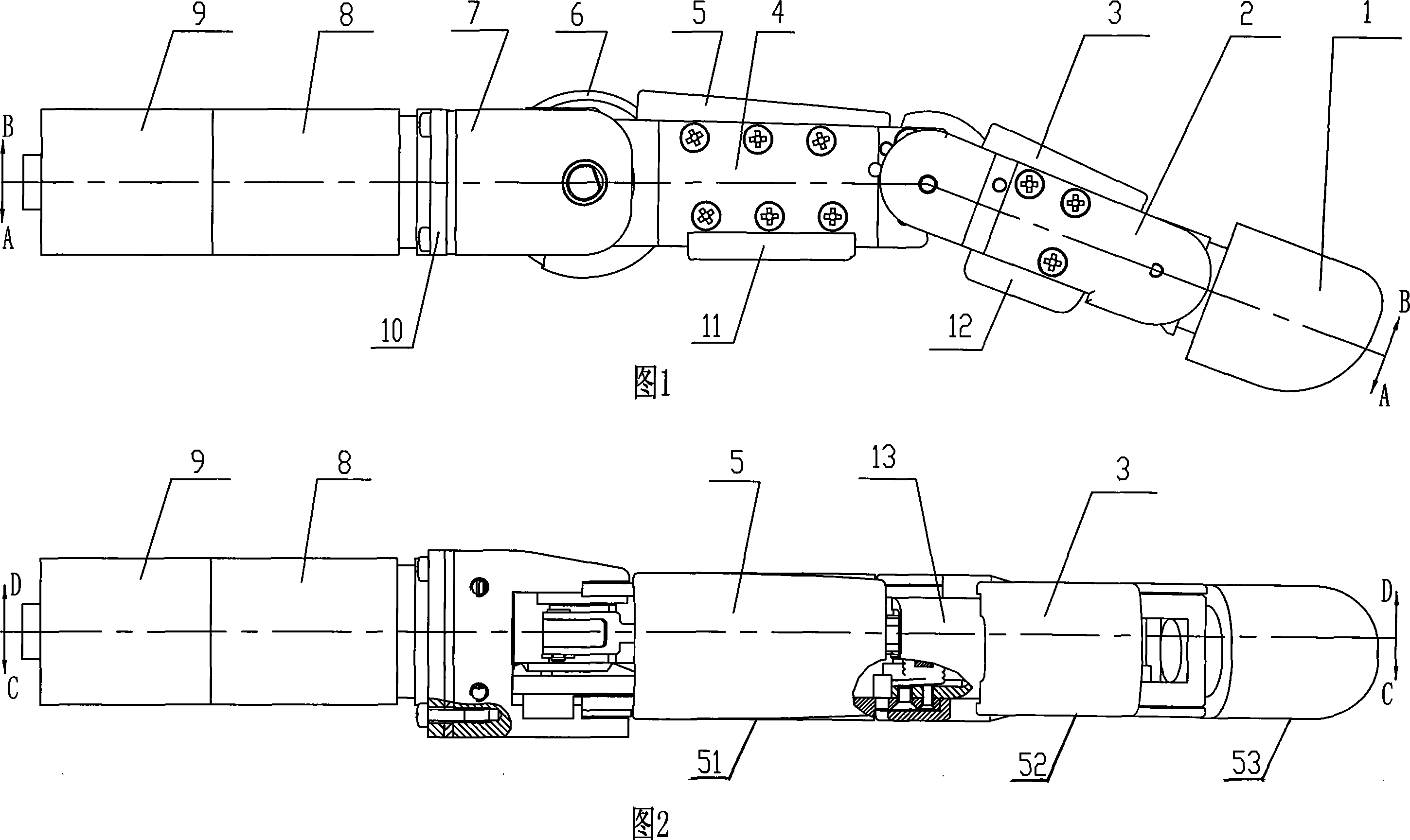
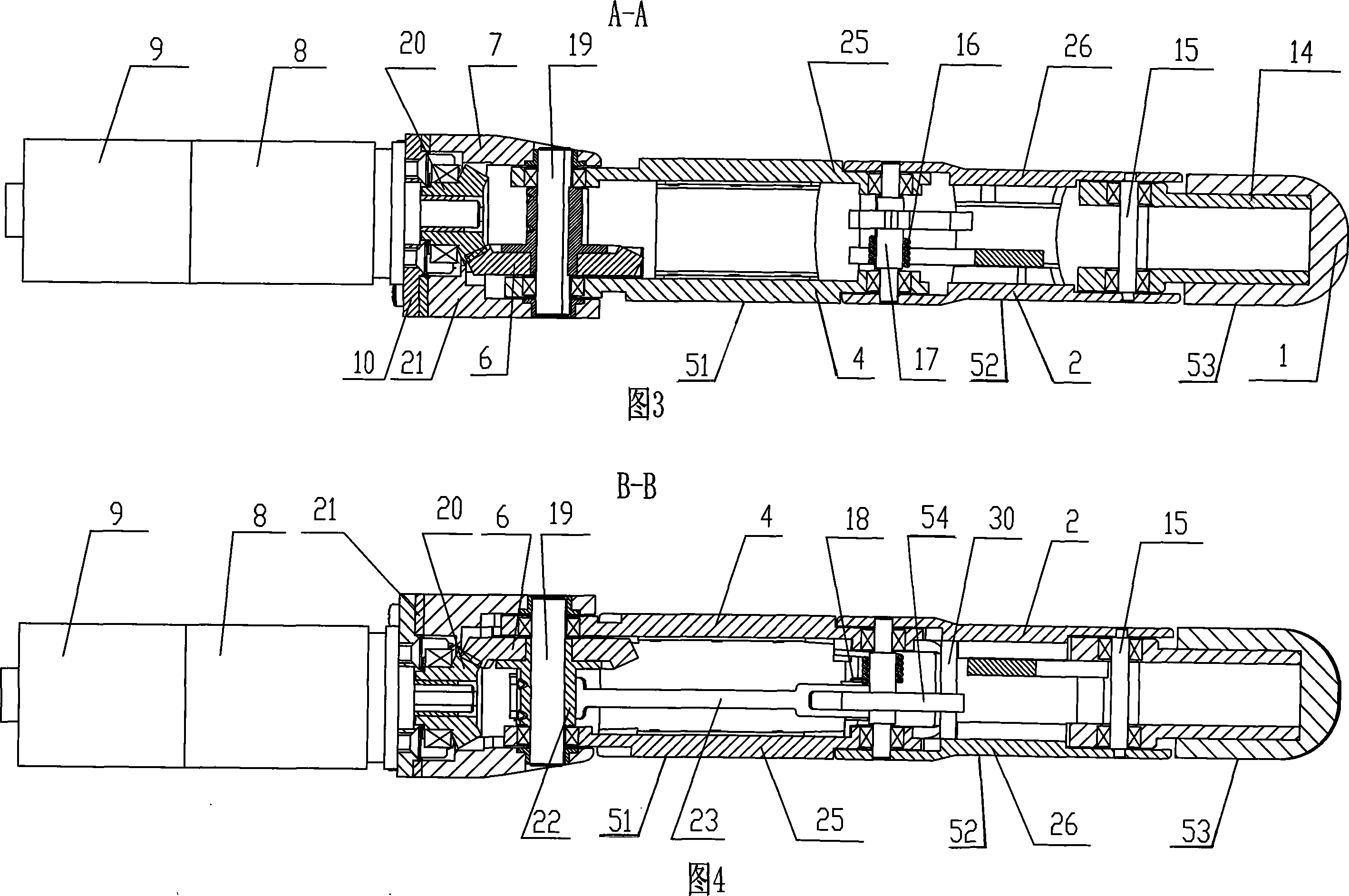
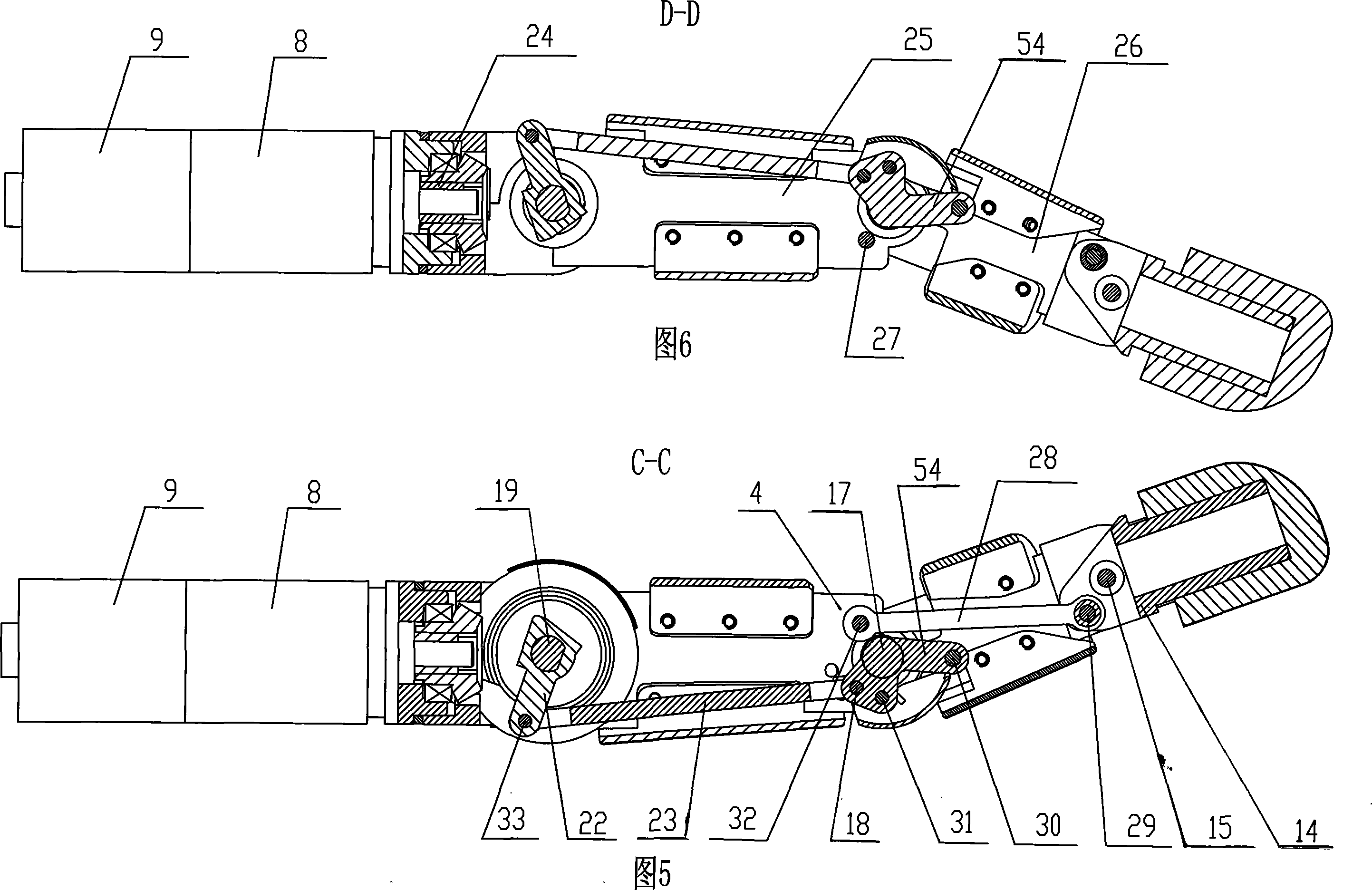
[0007] Specific Embodiment 1: As shown in Figures 1 to 6, the underactuated coupling transmission type humanoid finger mechanism of this embodiment consists of a motor 9, a reducer 8, a motor seat 10, a finger base 7, a small bevel gear sleeve 24, Small bevel gear 20, large bevel gear 6, near knuckle 51, middle knuckle 52, far knuckle 53, finger base joint shaft 19, middle joint shaft 17, fingertip shaft 15, middle joint torsion spring 16, base joint torque sensor 22. Near-knuckle connecting rod 23, coupling connecting rod 28, coupling middle joint shaft 30, shaft plate 54 of middle joint shaft, No. 1 spring stop pin 27, No. 2 spring stop pin 31, No. 1 connecting rod pin 33, No. 2 connecting rod pin shaft 18, No. 1 coupling connecting rod shaft 32, and No. 2 coupling connecting rod shaft 29 are composed, and the shaft disk 54 of the middle joint shaft is fixed on the described middle joint shaft 17; the motor 9 and the speed reducer 8 connection, the reducer 8 is fixed on the ...
specific Embodiment approach 2
[0008] Specific embodiment two: as shown in Figures 1 to 6, the proximal knuckle 51 in this embodiment consists of the proximal knuckle left side plate 25, the proximal knuckle right side plate 4, the proximal knuckle upper cover plate 5, the proximal knuckle The lower cover plate 11 is composed of the left side of the proximal knuckle upper cover 5 and the left side of the proximal knuckle lower cover 11 respectively fixedly connected with the proximal knuckle left side plate 25, and the proximal knuckle upper cover The right side of the plate 5 and the right side of the lower cover plate 11 of the proximal knuckle are respectively fixedly connected with the right side of the proximal knuckle 4; Middle phalanx upper cover 3, middle phalanx lower cover 12, and middle joint guard 13, the left side of the middle phalanx upper cover 3 and the left side of the middle phalanx lower cover 12 are respectively connected to the left side of the middle phalanx. Plate 26 is fixedly conne...
specific Embodiment approach 3
[0009] Embodiment 3: The motor 9 in this embodiment is a stepping motor. Because the stepper motor has a reverse holding torque, it can maintain the gripping state when the power is lost. Other compositions and connections are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More