

Three degrees of freedom right angle coordinate manipulator
A Cartesian coordinate, manipulator technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effects of diverse functions, high cost performance and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
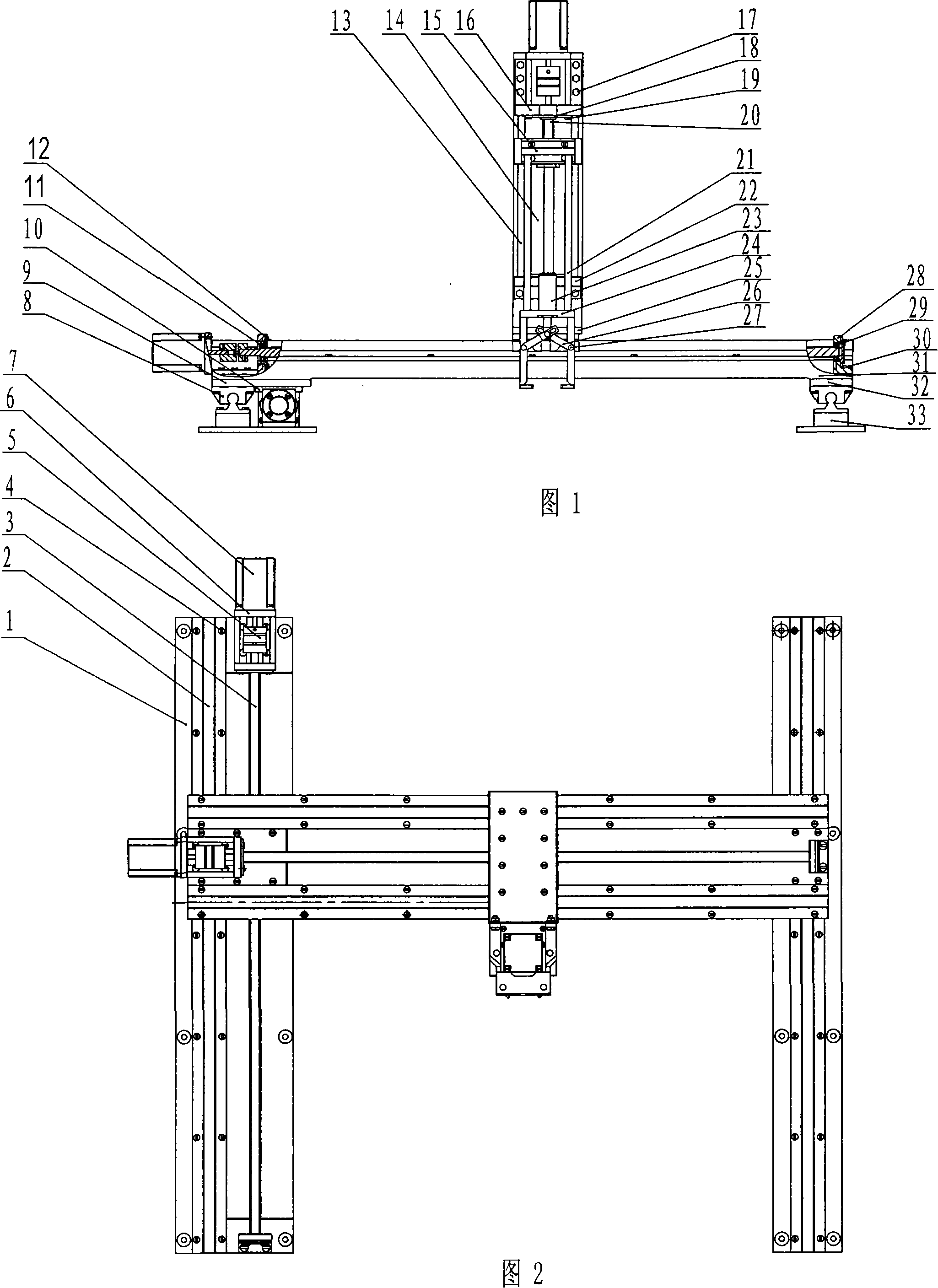
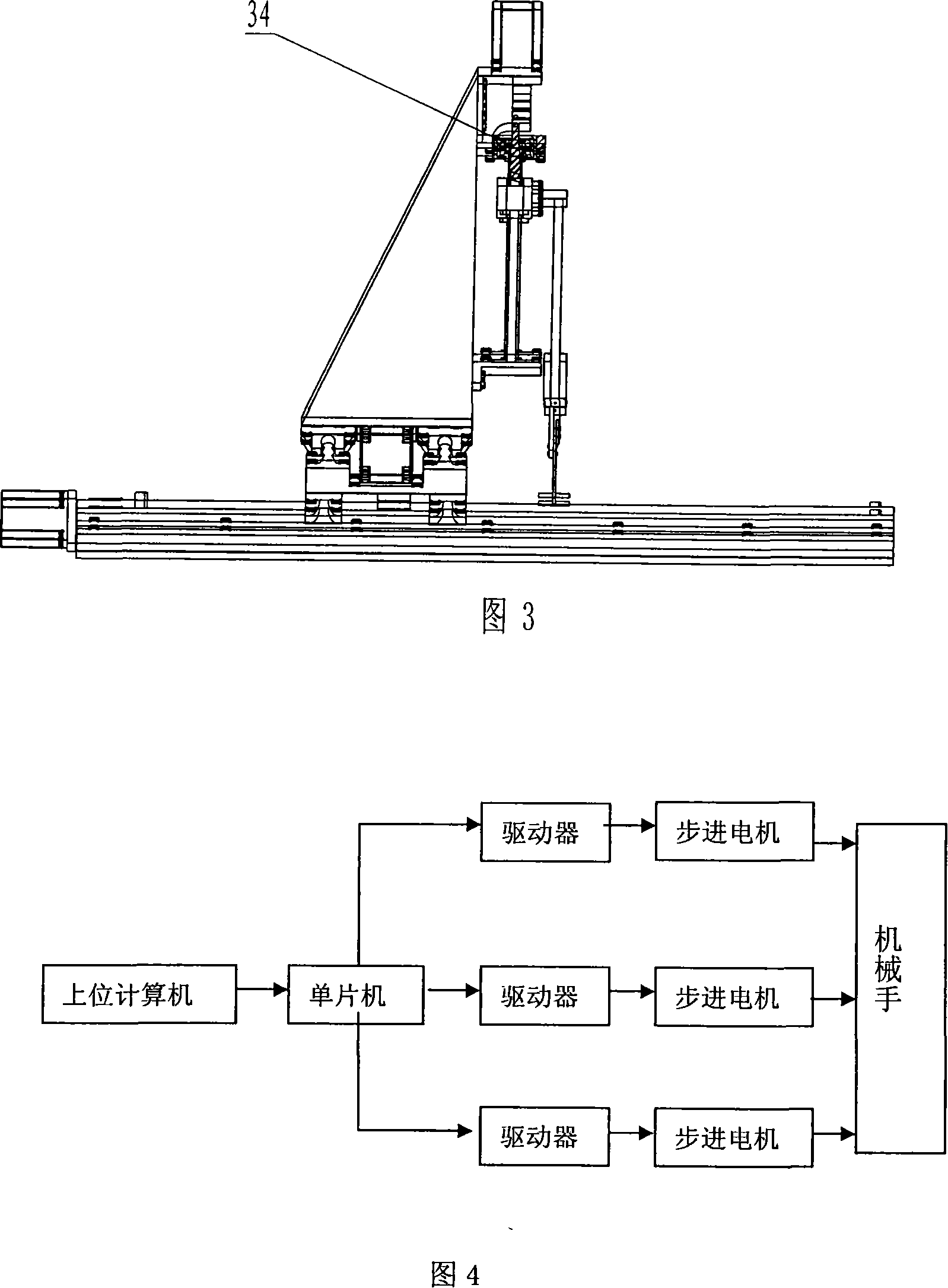
[0014] In Fig. 1, Fig. 2, Fig. 3, and Fig. 4, a three-degree-of-freedom rectangular coordinate manipulator mainly includes a base, a linear guide rail 2, a screw, a stepping motor 7, a coupling 5, a bearing seat, and a slider 8 , Deep groove ball bearing 11, feed rod, electromagnet 23, finger 26, tapered roller bearing 34. The mechanical part is composed of X, Y, Z three direction mechanisms, Y direction mechanism, the linear guide rail 2 is fixed on the base b31 through the screw 4, the screw a3 is connected to the output shaft of the stepping motor 7 through the coupling 5, the screw a3 is two The end is supported by the bearing housing a6. The basic structure of the X-direction mechanism is the same as that of the Y-direction mechanism. The two are connected by a nut a10. The Y-direction mechanism is fixed on the slider 8 through the connecting plate a9 and the connecting plate c32. The slider 8 can move along the direction of the base c33 and the base a1. , The cup a12 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More