

Scroll cable detecting robot
A robot and cable technology, applied in the field of robots, can solve problems such as impracticability, low work efficiency, and danger, and achieve the effects of reducing friction, reliable operation, and stable climbing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing, the present invention is described in detail:
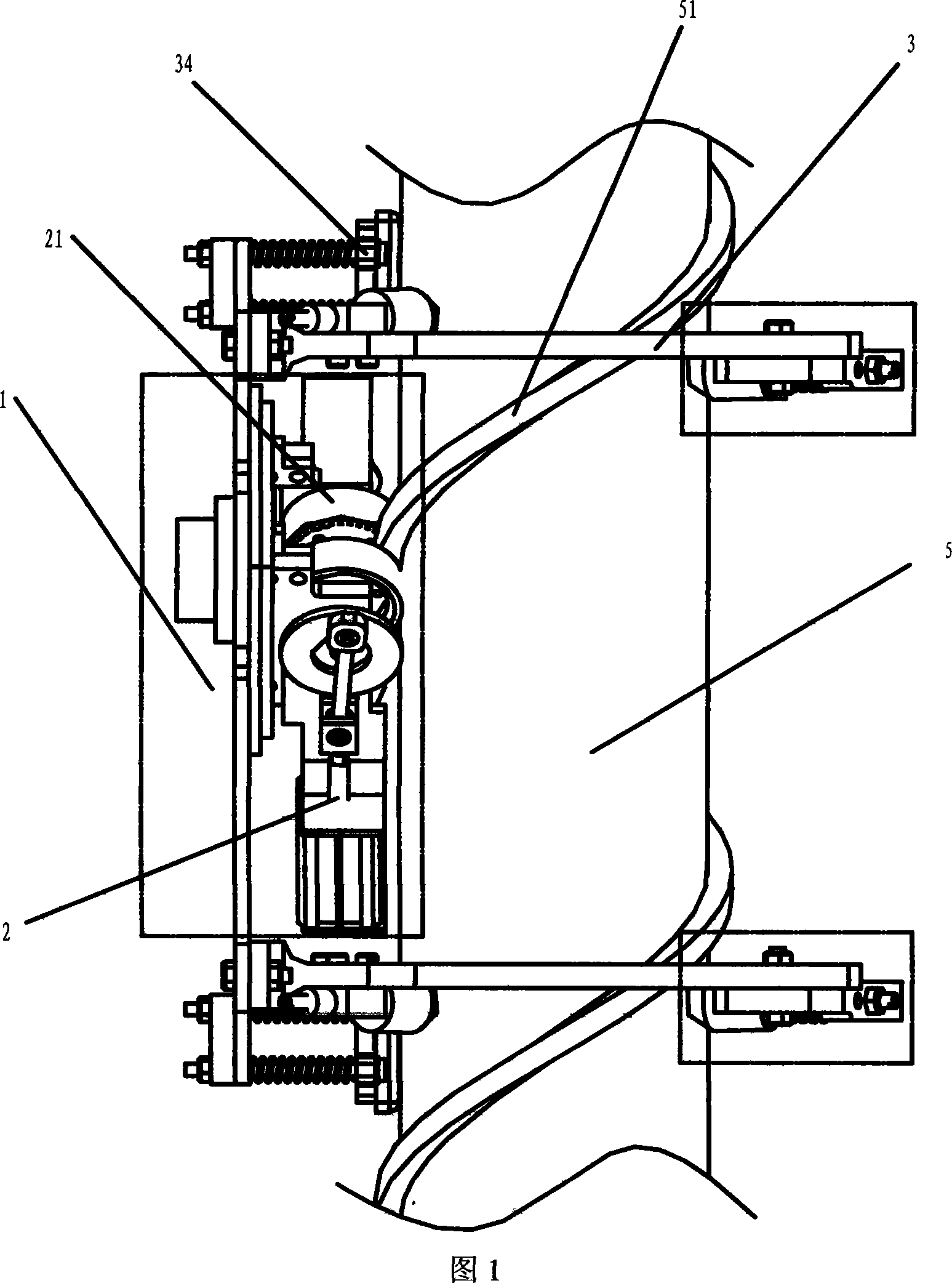
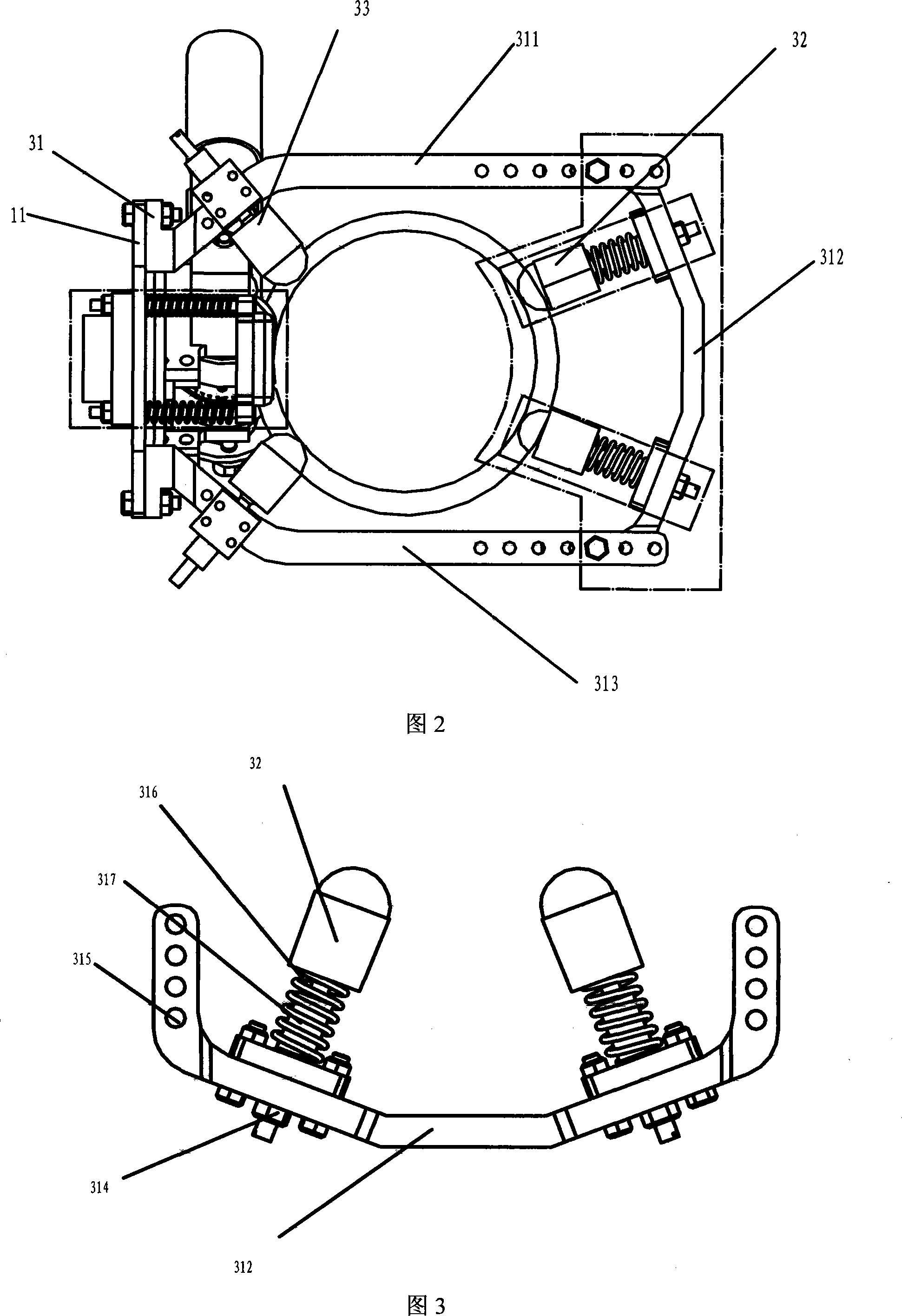
[0031] Shown in Fig. 1, Fig. 2 is the overall structural diagram of the spiral cable detection robot of the present invention, comprises a trolley 1 that is arranged along the circumferential direction of cable 5 and is arranged on trolley 1 upper end and lower end and is used for trolley 1 support The gripping device 3 tightly on the cable 5, the trolley at least includes a climbing mechanism 2 with a drive wheel 21, the drive wheel 21 forms an angle with the axial direction of the cable 5, and the angle is in line with the helix 51 of the cable 5. same helix angle. Described driving wheel 21 is arranged on the driving wheel axle 22, is also provided with a first bevel gear 23 on this driving wheel axle 22, and a motor 6 drives and is provided with the second bevel gear 24 that cooperates with the first bevel gear 23 The gear shaft, the driving wheel 21 realizes transmissio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More