

Amphibious mechanical crab step control device and control method
A hierarchical control and crab technology, applied in two-dimensional position/channel control, electric controller, comprehensive factory control, etc., can solve the problems of poor overall control performance, low reliability, system paralysis, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is described in more detail below in conjunction with accompanying drawing example:
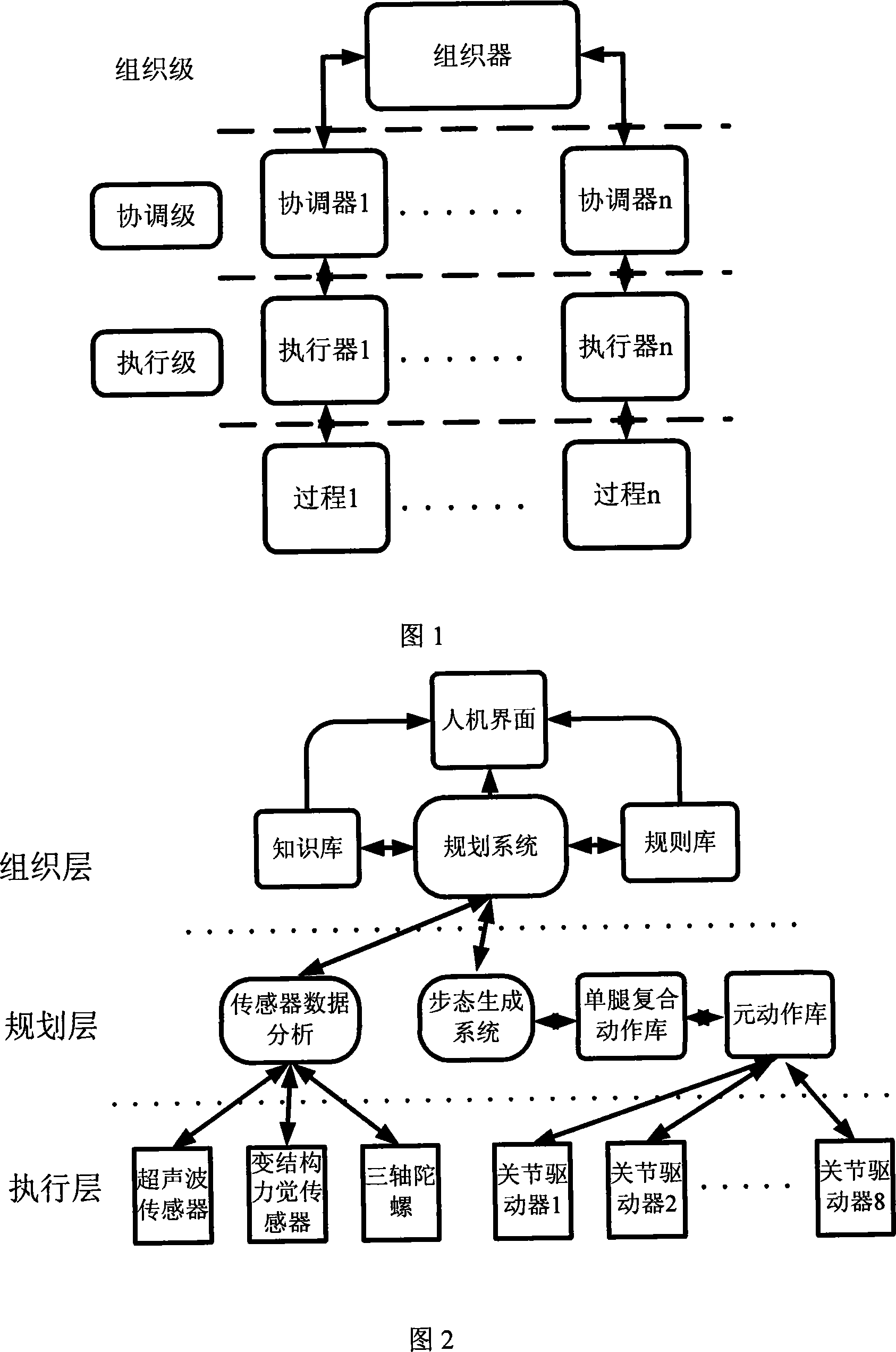
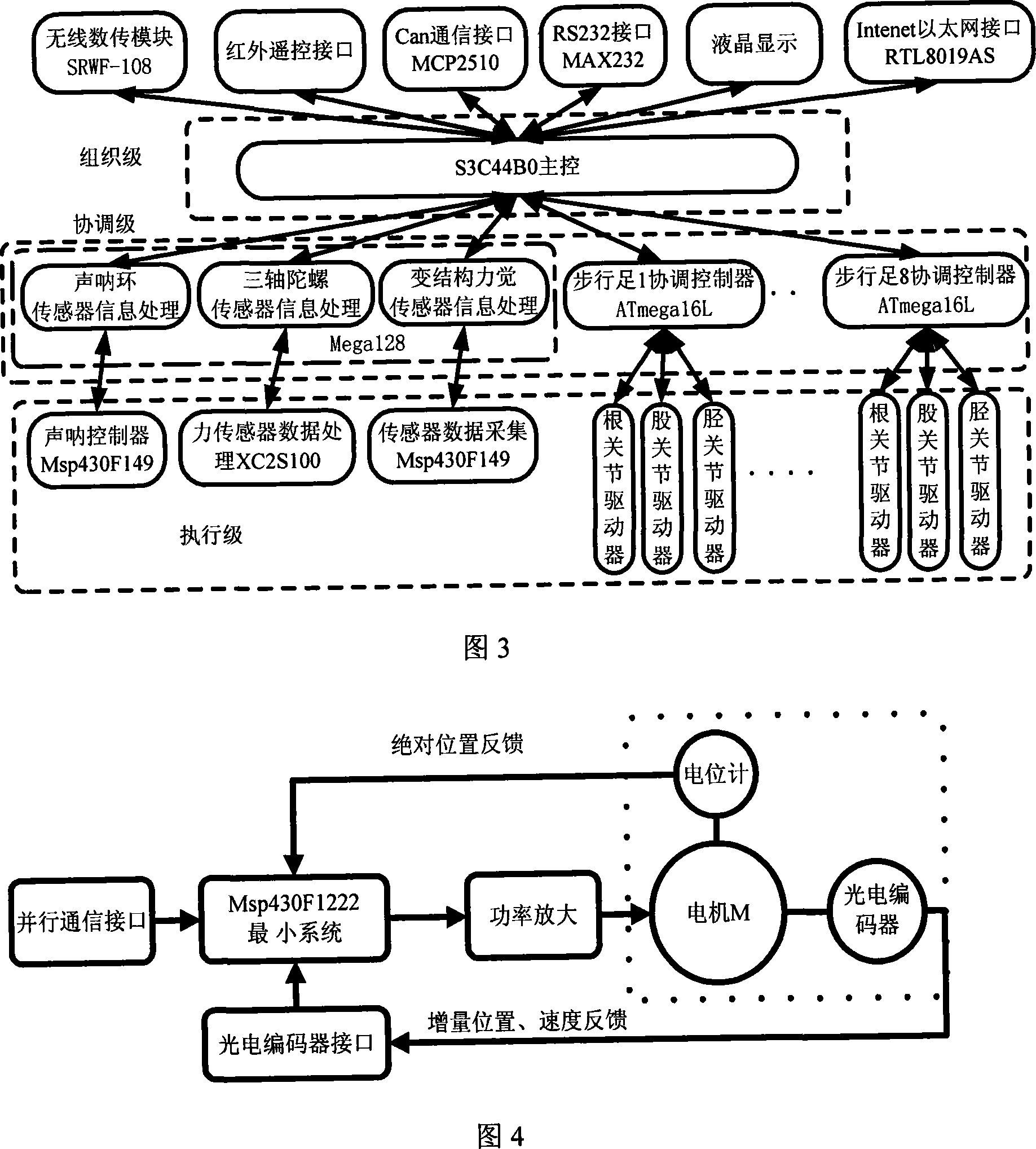
[0039] Combined with Figure 1, Figure 2 and Figure 3, it includes three parts: the upper organizational level, the middle coordination level and the lower execution level. The upper organization-level control system is mainly composed of S3C44B0 as the core ARM system, and peripheral extensions include wireless data transmission module SRWKF-108, infrared remote control interface, Can communication interface MCP2510, RS232 interface MAX232, liquid crystal display module and Intenet Ethernet interface RTL8019AS, etc. The organization-level functions are mainly responsible for accepting user commands, feeding back information to users, and planning the movement strategy of each crab leg according to the on-site environment. The wireless data transmission module SRWKF-108 and the infrared remote control interface are connected to the main robot controller through thei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More