

Arc welding robot jointing monitoring system based vision sensing
A technology of robot welding and visual sensing, applied in the system field of robot technology, can solve problems such as inability to realize online adjustment of welding parameters, inability to obtain real-time dynamic information of molten pool, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
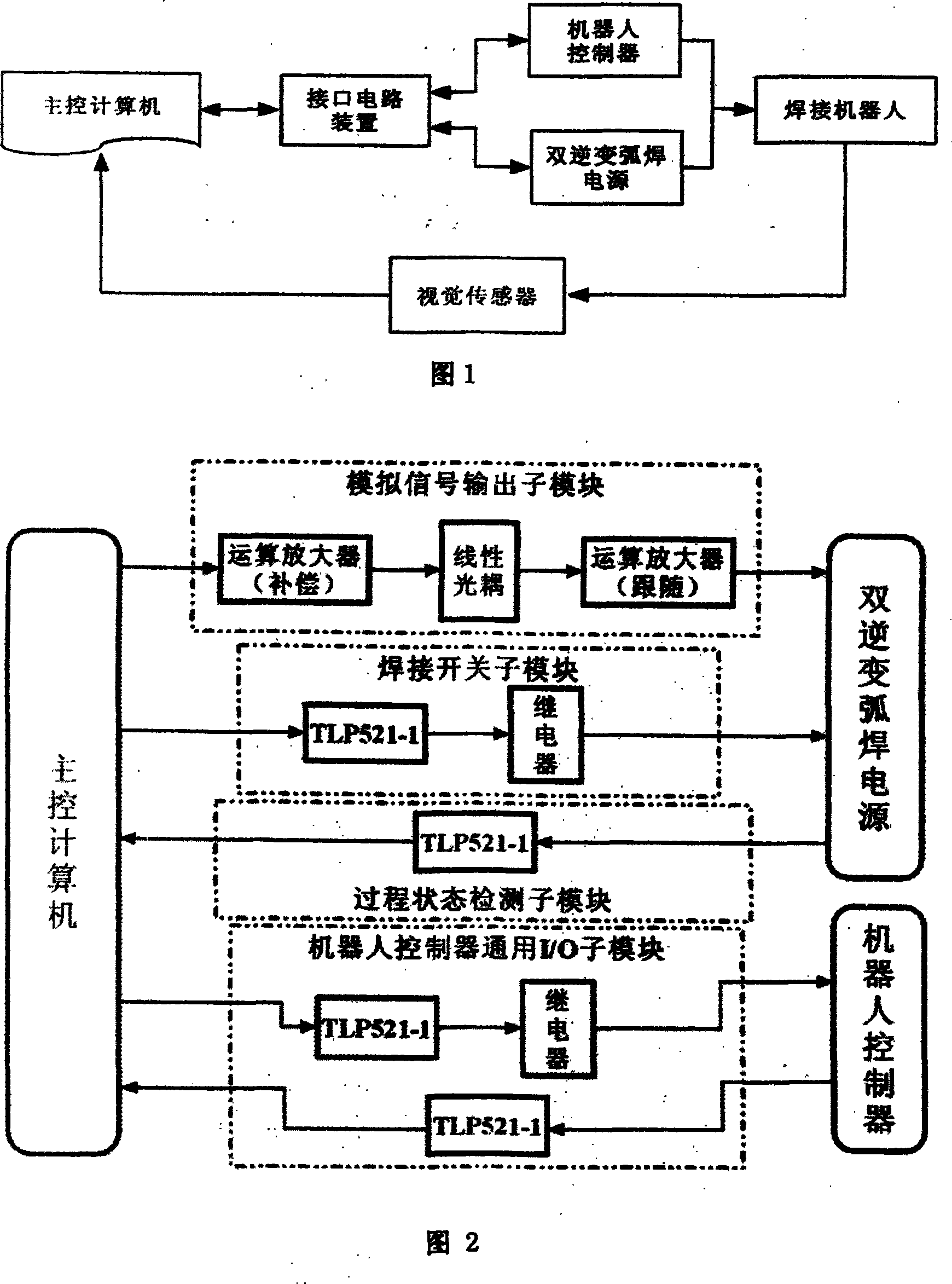
[0029] As shown in Figure 1, this embodiment includes: a visual sensing system, a double inverter arc welding power supply, an interface circuit device, a main control computer, a robot controller, and a welding robot, wherein:
[0030] The visual sensing system is responsible for dynamically collecting images of the welding pool during the welding process, and transmitting the collected images to the main control computer through the video line;
[0031] The internal state monitoring port of the double inverter arc welding power supply, the welding current of the wel...
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More