

Robot initial welding position recognition system and method based on monocular vision sensing
A monocular vision and recognition system technology, applied in the field of arc welding robot guidance control system, to achieve the effect of flexible and convenient image capture and processing, acceleration speed, and omitting complicated steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
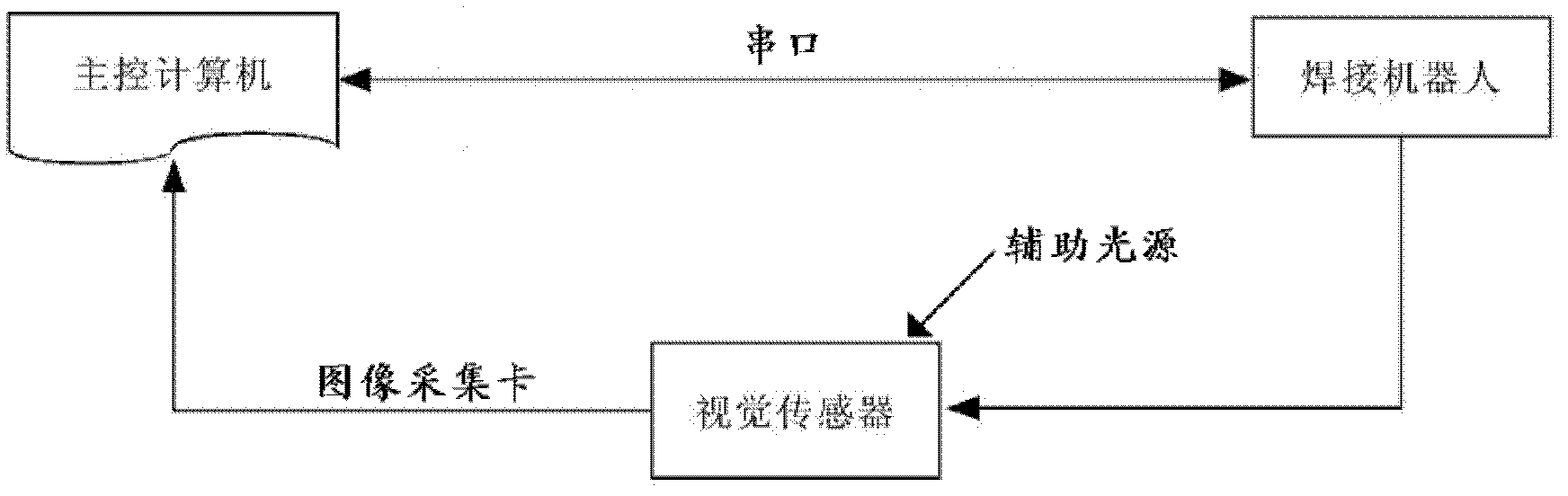
[0031] Such as figure 1 As shown, the robot GMAW initial welding position recognition system based on monocular vision sensing in this embodiment includes: a welding robot, a monocular vision sensing system, a main control computer, and an auxiliary light source, wherein:
[0032] The welding robot is used to weld the workpiece to be welded, and after it moves the corresponding position, it sends a shooting permission signal to the main control computer; the corresponding position described in this specific embodiment may be a position with a fixed height relative to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More