

Underwater robot adjusted by three oil-bags and depth-setting control method thereof
An underwater robot and oil bag technology, applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems that the horizontal rudder cannot achieve vertical lurking motion, high rudder efficiency, and reduce the voyage of the underwater robot.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in more detail below in conjunction with accompanying drawing example:
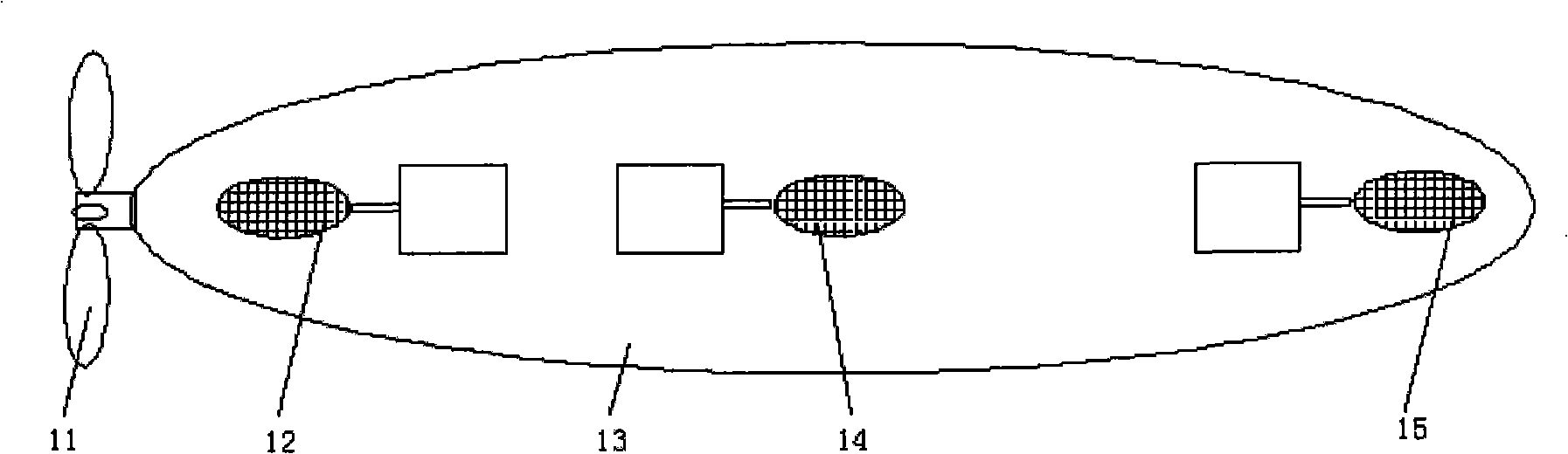
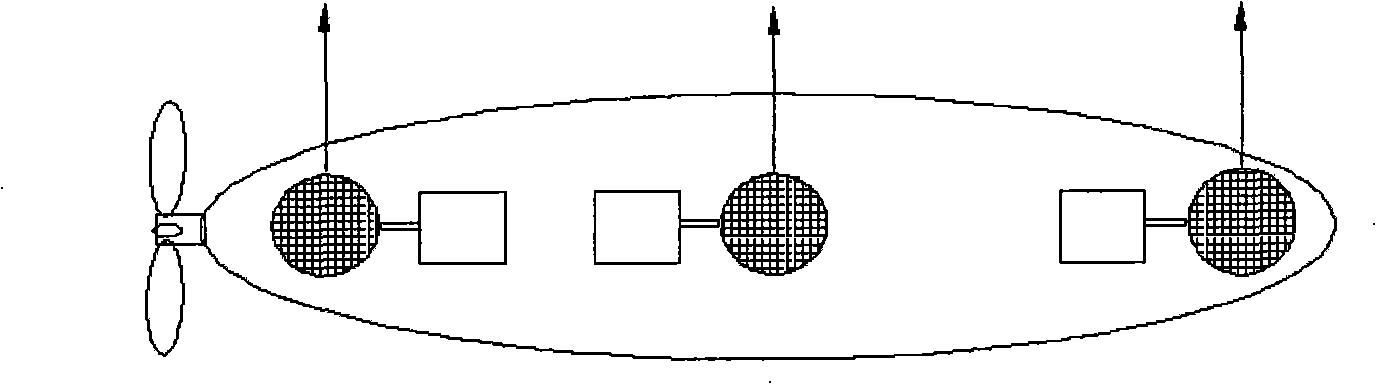
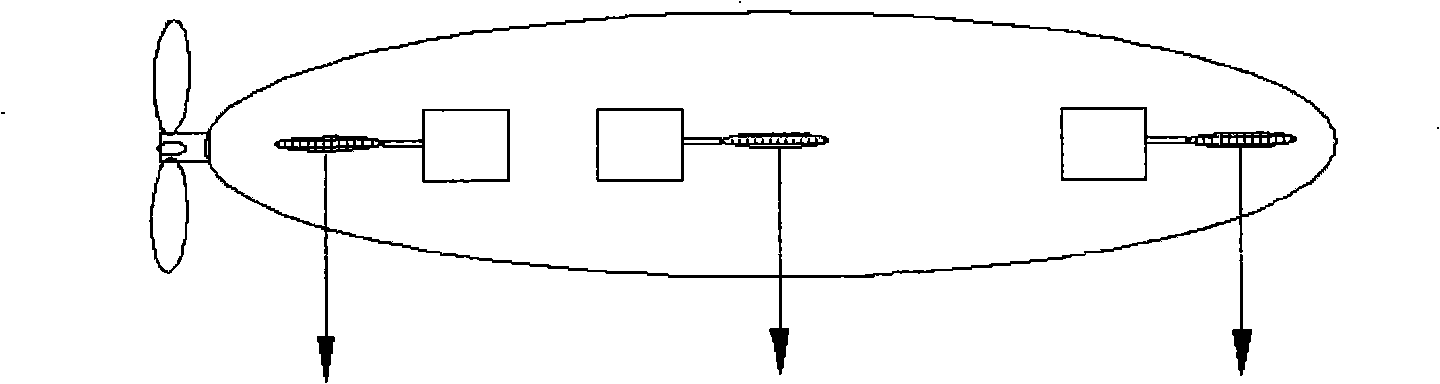
[0024] combine figure 1 , the underwater robot regulated by three oil bags includes a hull 13, an axial main thruster 11 is arranged at the stern of the hull, and an oil bag, an oil storage tank and a connection are respectively arranged at the bow, midship, and stern of the hull. Bow oil bag buoyancy adjustment device 15, midship oil bag buoyancy adjustment device 14, and stern oil bag buoyancy adjustment device 12, which are composed of the oil pipeline between the oil bag and the oil storage tank and the oil circuit control mechanism, can obtain depth, longitudinal speed, attitude Sensors for angle information are installed in their corresponding positions. combine Image 6 The oil circuit control mechanism of the oil bag buoyancy adjustment device composed of the oil pipeline between the oil bag 8 and the oil storage tank 7 and the oil circuit control mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More