

Permanent magnet spherical motor mechanical decoupling control method based on neural network identifier
A neural network and decoupling control technology, applied in the field of dynamic control of permanent magnet spherical motors, can solve problems such as the robustness requirements of the external disturbance system without considering the model estimation error system, the static and dynamic performance of the algorithm is not ideal, and achieve the realization of Dynamic decoupling control, improved static and dynamic performance, good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
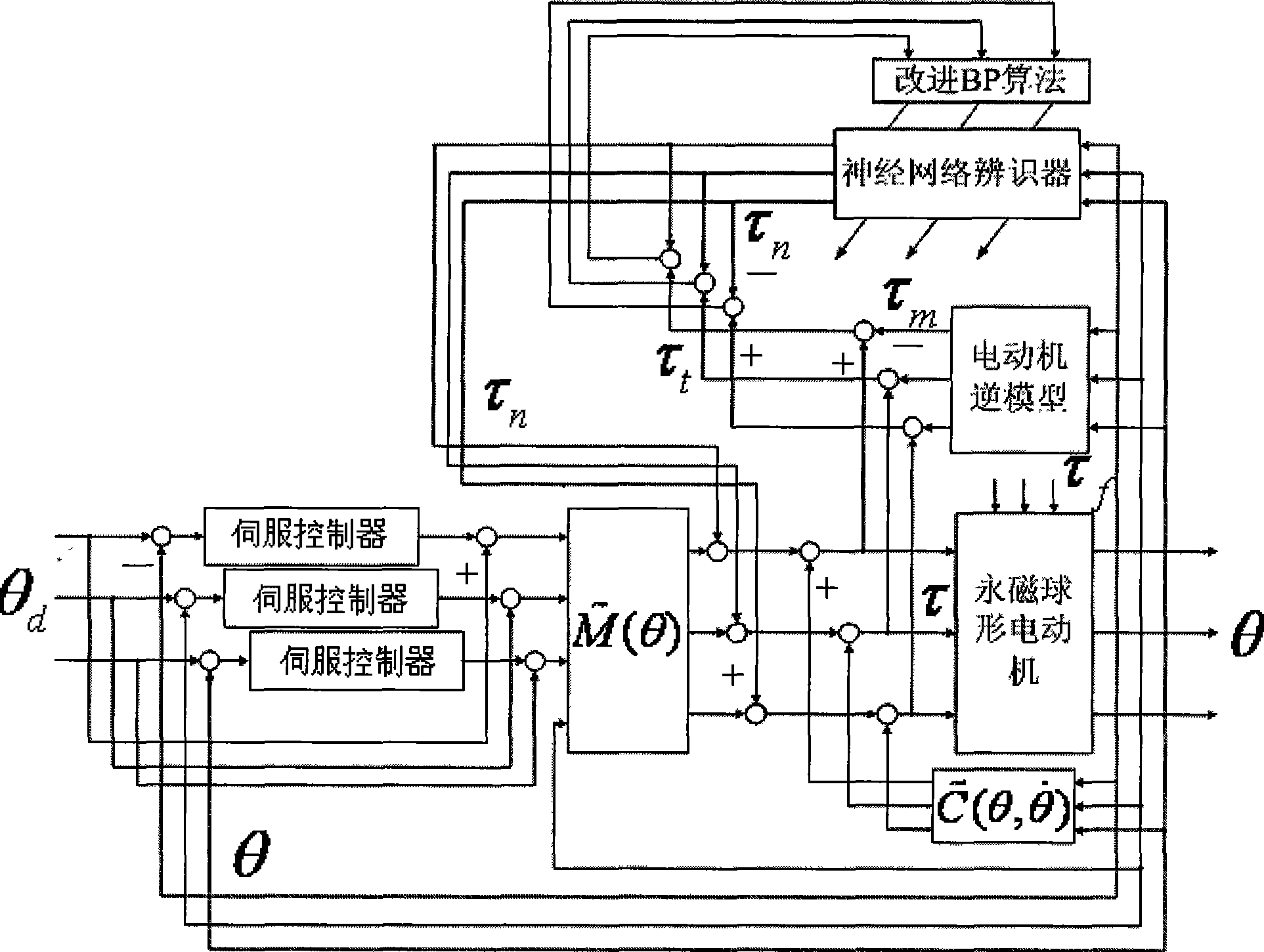
[0039] The structural block diagram of the spherical motor mechanical decoupling control method containing the neural network identifier of the present invention is as follows figure 1 shown. The main controller of Embodiment 1 of the present invention adopts conventional servo control, namely PD control, and uses a neural network identifier to realize feedforward neural network control.
[0040] According to the Lagrangian method or Newton-Euler method, the dynamic equation of the spherical motor can be obtained as follows:
[0041] M ( θ ) θ . . + C ( θ , θ . ) θ . + τ f = τ - - - ( ...
Embodiment 2
[0085] Since the dynamic model of the spherical motor is relatively complicated, in embodiment 2, the PD part in the formula (4) is changed into a two-dimensional fuzzy control, and each fuzzy controller controls a rotation axis of the Calton angle of the spherical motor, To enhance the robustness of the control system. Two-dimensional fuzzy controller such as Figure 6 shown. In the figure, k e and k ec is the quantization factor, and e and The changing range of is converted to the input universe; k u is a proportional factor, which converts the output of the fuzzy control part (corresponding to the output domain of the fuzzy control) into the actual output of the fuzzy controller. The structural block diagram of the control method of embodiment 2 is as Figure 7 shown.
[0086] The fuzzy control input domain and output domain of this two-dimensional fuzzy controller are both set to [-6, 6], and the seven language sets are defined as {PB, PM, PS, Z, NS, NM, NB}, each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More