

Bionics machine acaleph driven by shape-memory alloy wire
A technology of memory alloy wire and machine, which is applied in the direction of non-rotating propulsion elements, etc., can solve the problems of complex structure and different action principles of machine bionic jellyfish, and achieve the effect of good bionic effect, large action range and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
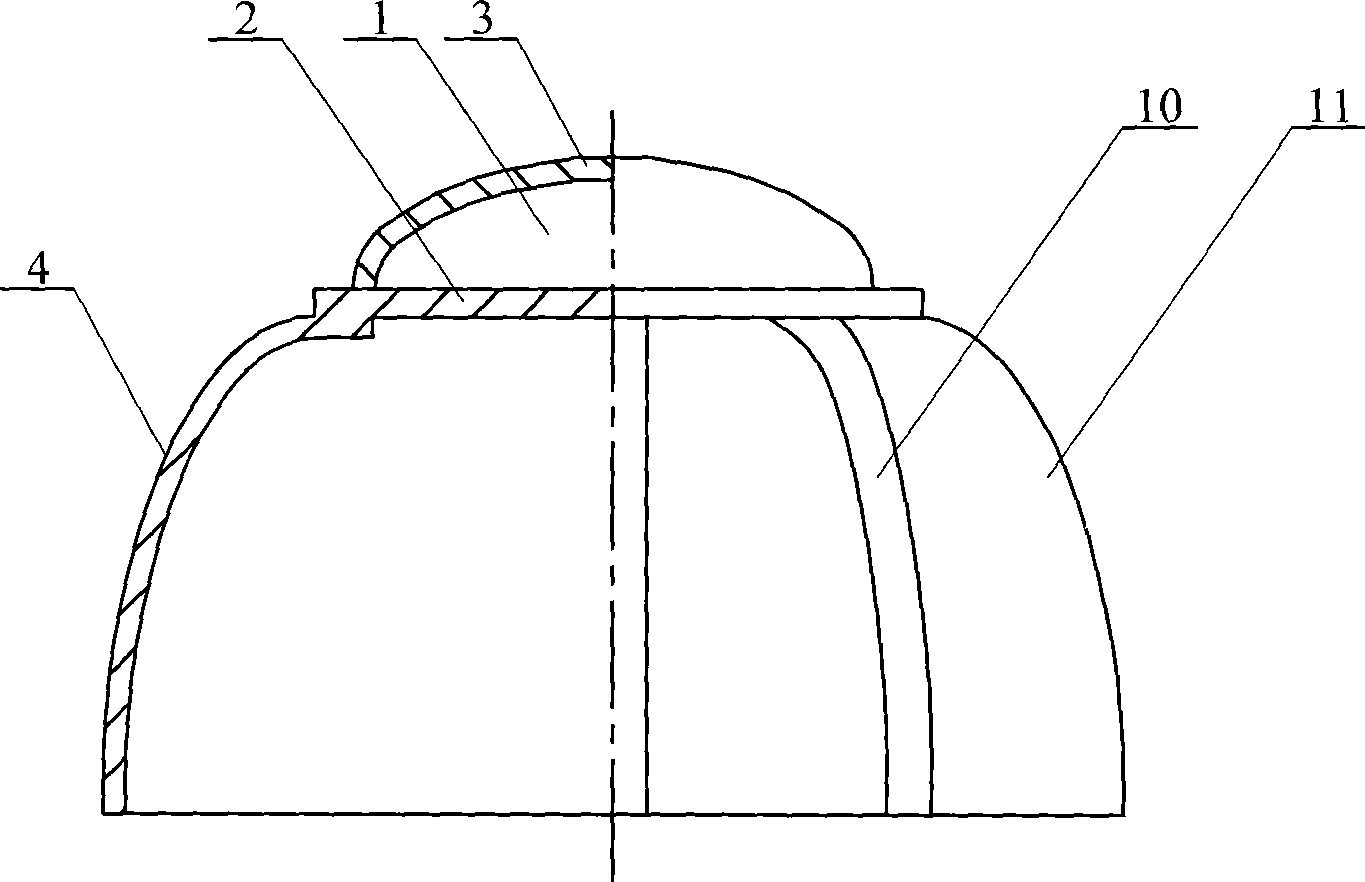
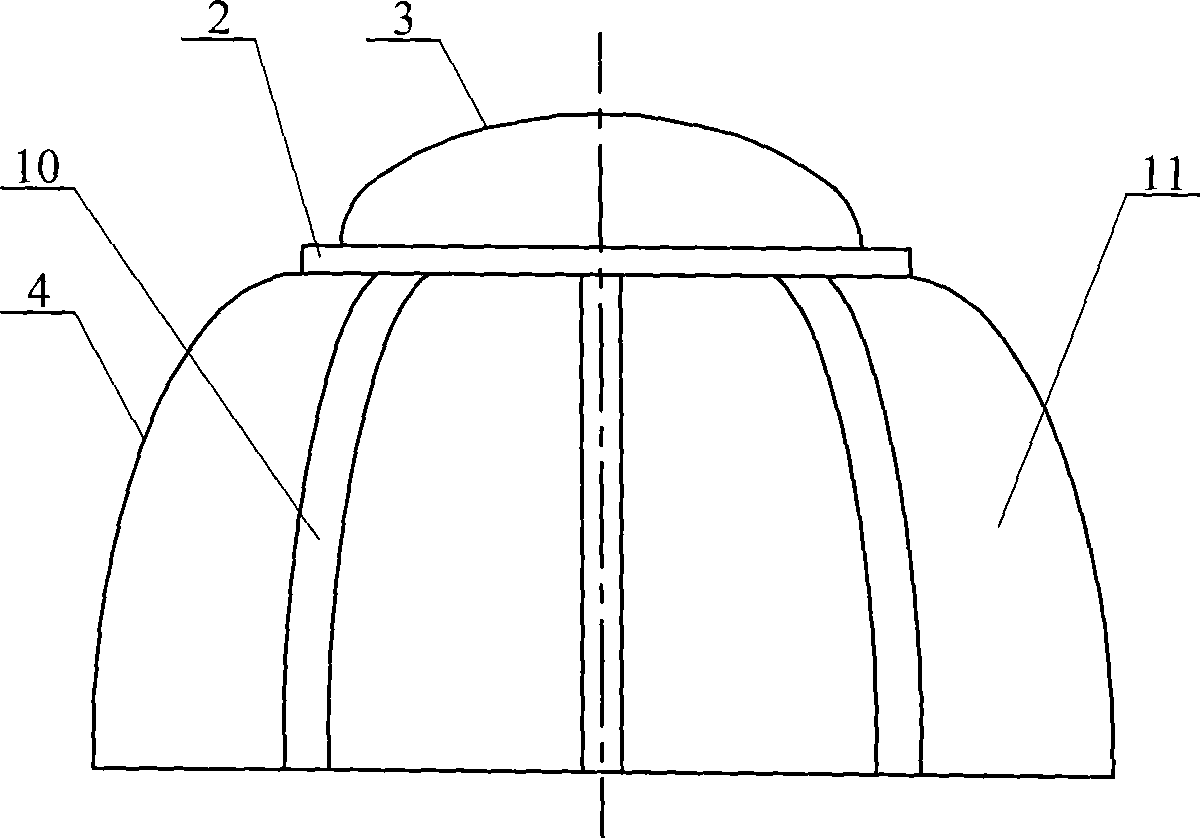
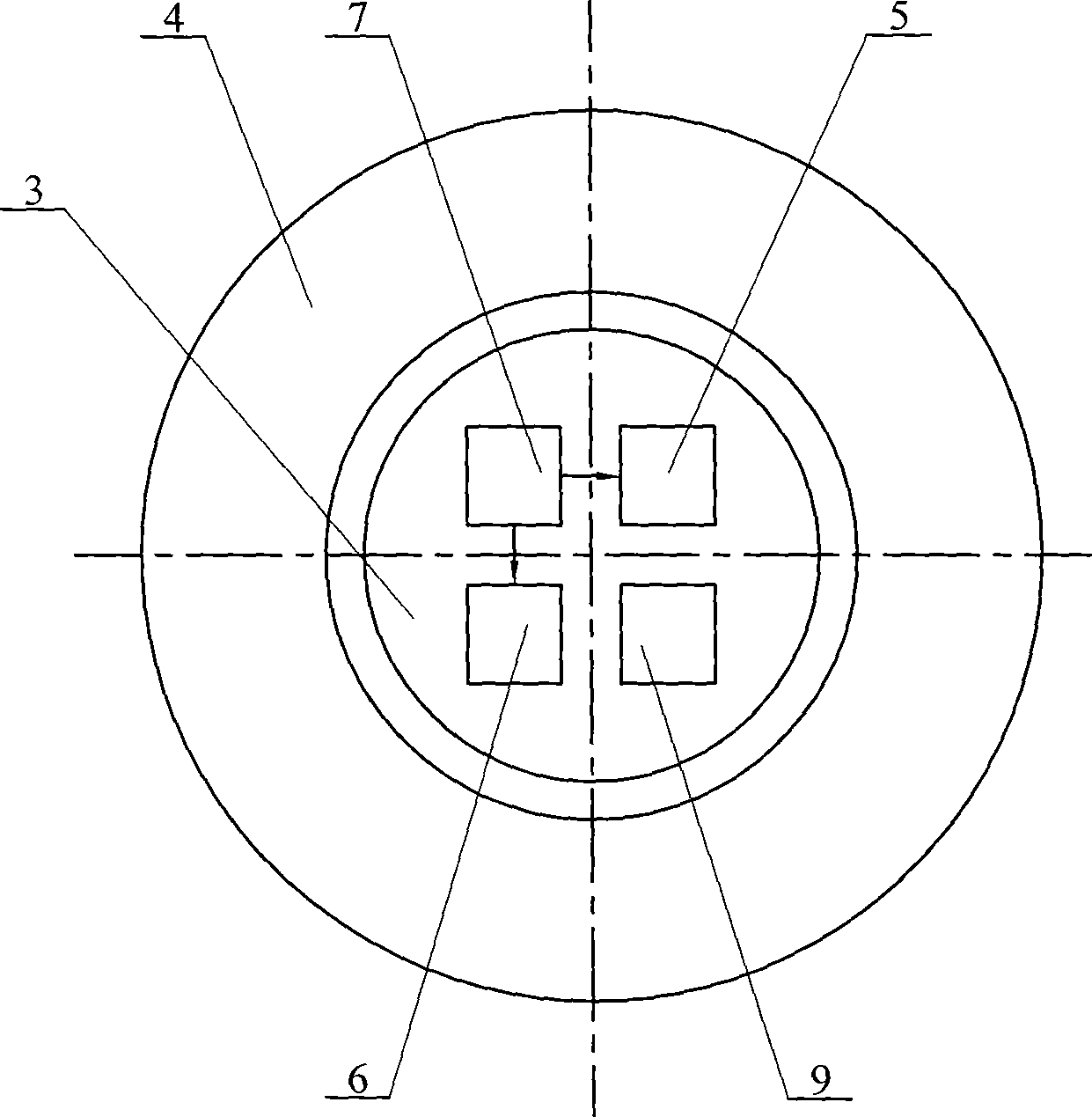
[0016] Specific implementation mode one: combine Figure 1 to Figure 12 Describe this embodiment, this embodiment is made up of upper chamber body 1, umbrella body 4, control device 5, communication device 6, power supply 7 and ups and downs control device 9; Said upper chamber body 1 is made up of support body 2 and sealing cover 3 , the umbrella body 4 is composed of an umbrella-shaped flexible layer 11 and at least three action units 10, the at least three action units 10 are uniformly distributed along the circumferential direction of the support body 2, and each action unit 10 is formed by a shape Memory alloy wire 12, elastic body 13, skin 15 and matrix 16, the upper end of the inner surface of each elastic body 13 is fixed with matrix 16, and each elastic body 13 is closely attached to the inner surface and fixed with shape memory alloy wire 12. The two ends of the shape memory alloy wire 12 are fixed on the base 16, and each action unit 10 is wrapped in the umbrella-sh...
specific Embodiment approach 2
[0025] Specific Embodiment 2: This embodiment is described with reference to Fig. 4, Fig. 7, Fig. 9 and Fig. 10. The shape memory alloy wire 12 of this embodiment is U-shaped, and the two sides of the base 16 and the U-shaped shape memory alloy wire 12 are A through hole 17 is respectively provided at the corresponding position of the end, and the shape memory alloy wire 12 is respectively connected to the output end of the power supply through the wire 14 passing through the two through holes 17 on the base body 16 . The U-shaped shape memory alloy wire 12 can ensure a larger contact area between the shape memory alloy wire 12 and the elastic body 13 . Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0026] Specific Embodiment Three: This embodiment is described in conjunction with Fig. 9 and Fig. 10. The elastic body 13 of this embodiment is an elastic sheet or an elastic sheet, and the elastic sheet or elastic sheet is made of an insulating material or a metal material. When the elastic sheet is a metal Insulation treatment must be done between the shape memory alloy wire 12 and the elastic body 13. The cross-section of the shape memory alloy wire 12 is circular, square or rectangular, and the elastic body 13 is in the shape of a flat strip, which can be bent at different angles or straight according to the overall shape of the jellyfish, so as to ensure that the shape memory alloy wire 12 Fit tightly on the elastic body 13. Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More