

Vision measuring method for three-dimensional pose of spacing target
A three-dimensional pose, space target technology, applied in the field of measurement, can solve the problems of slow convergence, large amount of calculation, difficult to meet real-time requirements, etc., to achieve good convergence and reduce computational complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
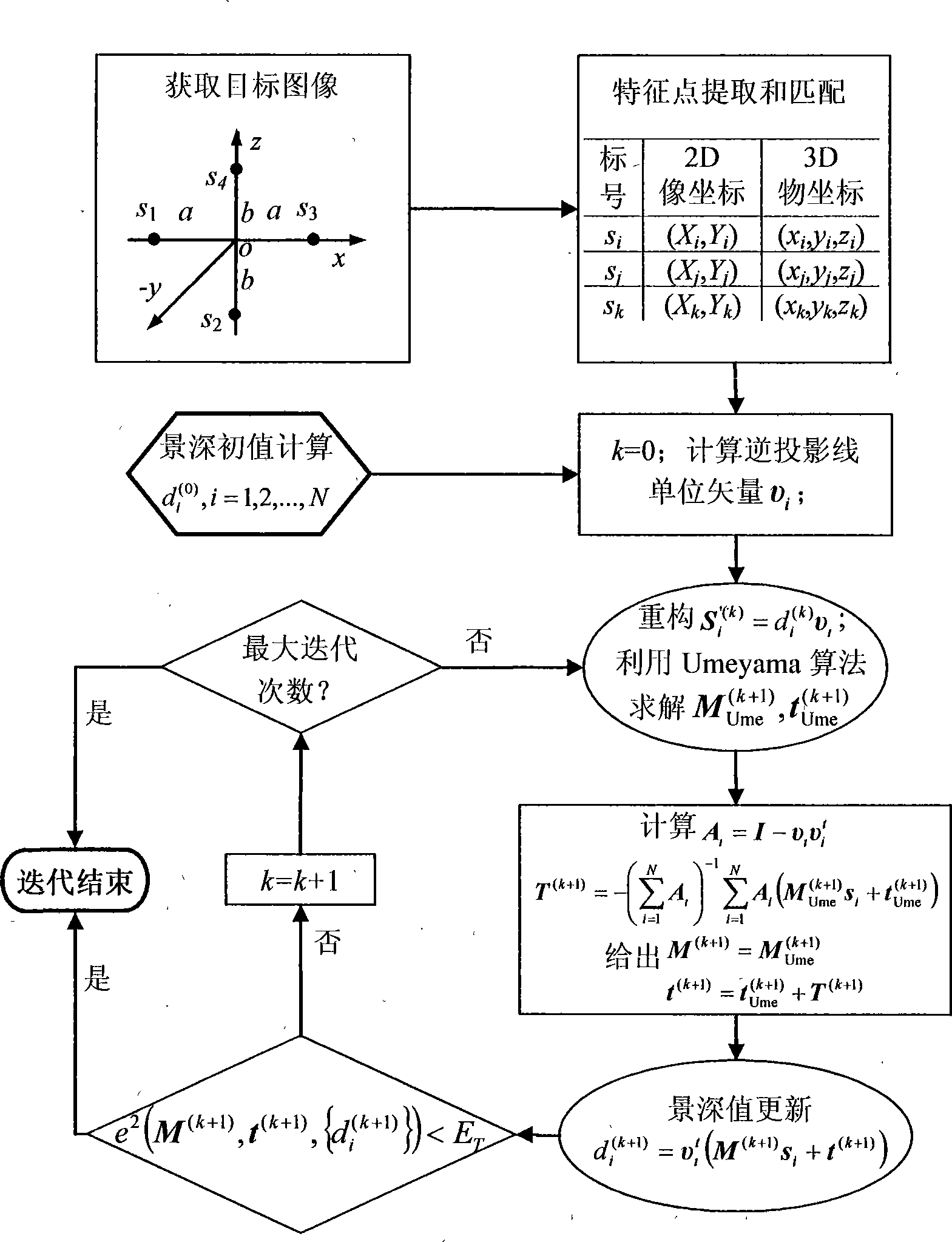
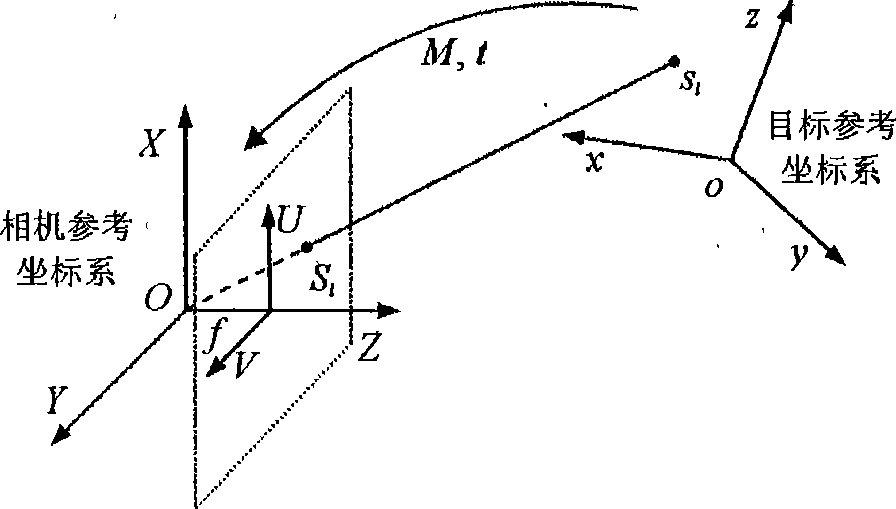
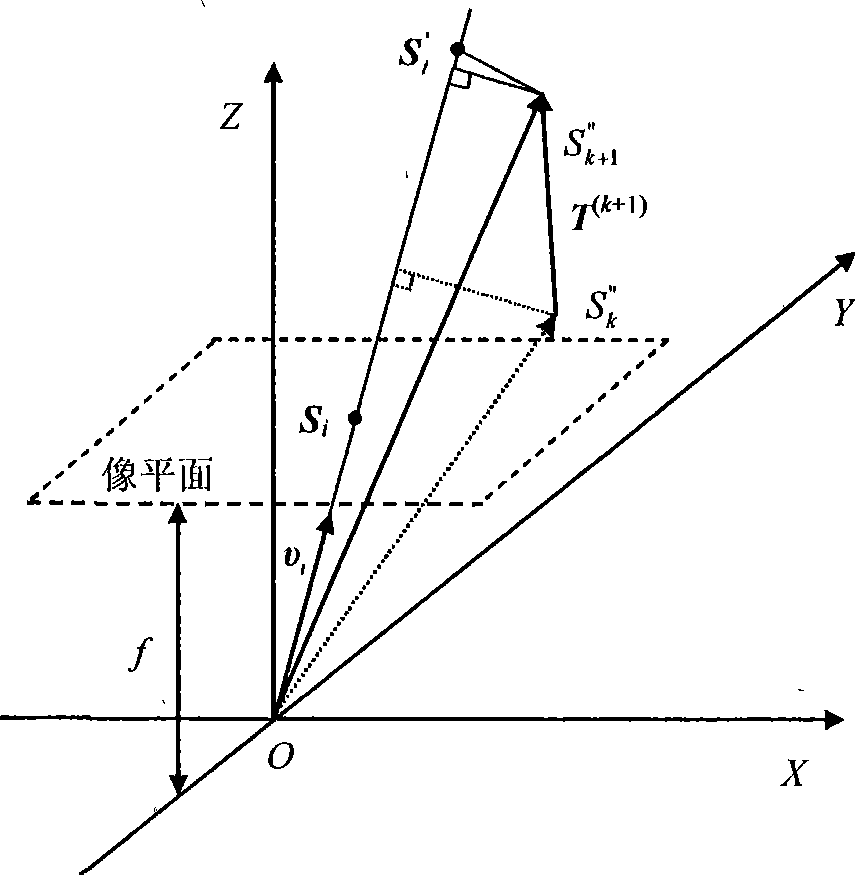
[0030] Embodiment 1, combining figure 1 , image 3 , the three-dimensional pose visual measurement method of the space object of the present invention is based on the inverse projection line idea, introduces the field depth variable of the feature point, and decomposes the three-dimensional pose calculation process into two stages of iterative absolute orientation calculation and depth estimation. In the absolute orientation solution stage, the absolute orientation solution analysis algorithm is used to calculate the relative attitude rotation matrix and relative translation vector of the space object; in the depth estimation stage, the relative pose given by the absolute orientation solution stage is used to reconstruct the space coordinates of each feature point , and update the depth of field of each feature point with the projection of the reconstructed feature point object space coordinates on the back projection line. The above two stages are iterated until the result c...
Embodiment 2
[0073] Embodiment 2, the method for visually measuring the three-dimensional pose and posture of the space object of the present invention also has the following technical features:
[0074] (1) The absolute directional solution algorithm is an analytical algorithm for the solution of an absolute directional problem, such as the Umeyama analytical algorithm;
[0075] (2) The absolute orientation solution stage also includes the correction of the three-dimensional pose given by the Umeyama analytical algorithm, namely M ( k + 1 ) = M Ume ( k + 1 ) , t ( k + 1 ) = t U...
Embodiment 3
[0092] Example 3, combined with Figure 4 , according to the three-dimensional pose vision measurement method of the space object proposed by the present invention, the actual measurement system is established, and the cursor point is set as Figure 4 As shown, the cursor point s i :(x i ,y i ,z i ) T , the coordinates of i=1,...,4 in the target coordinate system are:
[0093] s 1 : x 1 y 1 z 1 = 0 - 0.2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More