

Robot joint drive system
A driving device and robot technology, applied in the direction of electromechanical devices, transmission devices, gear transmission devices, etc., can solve the problems of undisclosed motor and reducer storage, and achieve the effect of reducing the occupied volume and easy inventory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Hereinafter, an example of an embodiment of the present invention will be described in detail with reference to the drawings.
[0022] First, refer to Figure 4 The overall structure will be described in general. Figure 4 It is a schematic plan view and a side view showing a case where a robot joint drive device according to an example of an embodiment of the present invention is used for a robot arm.
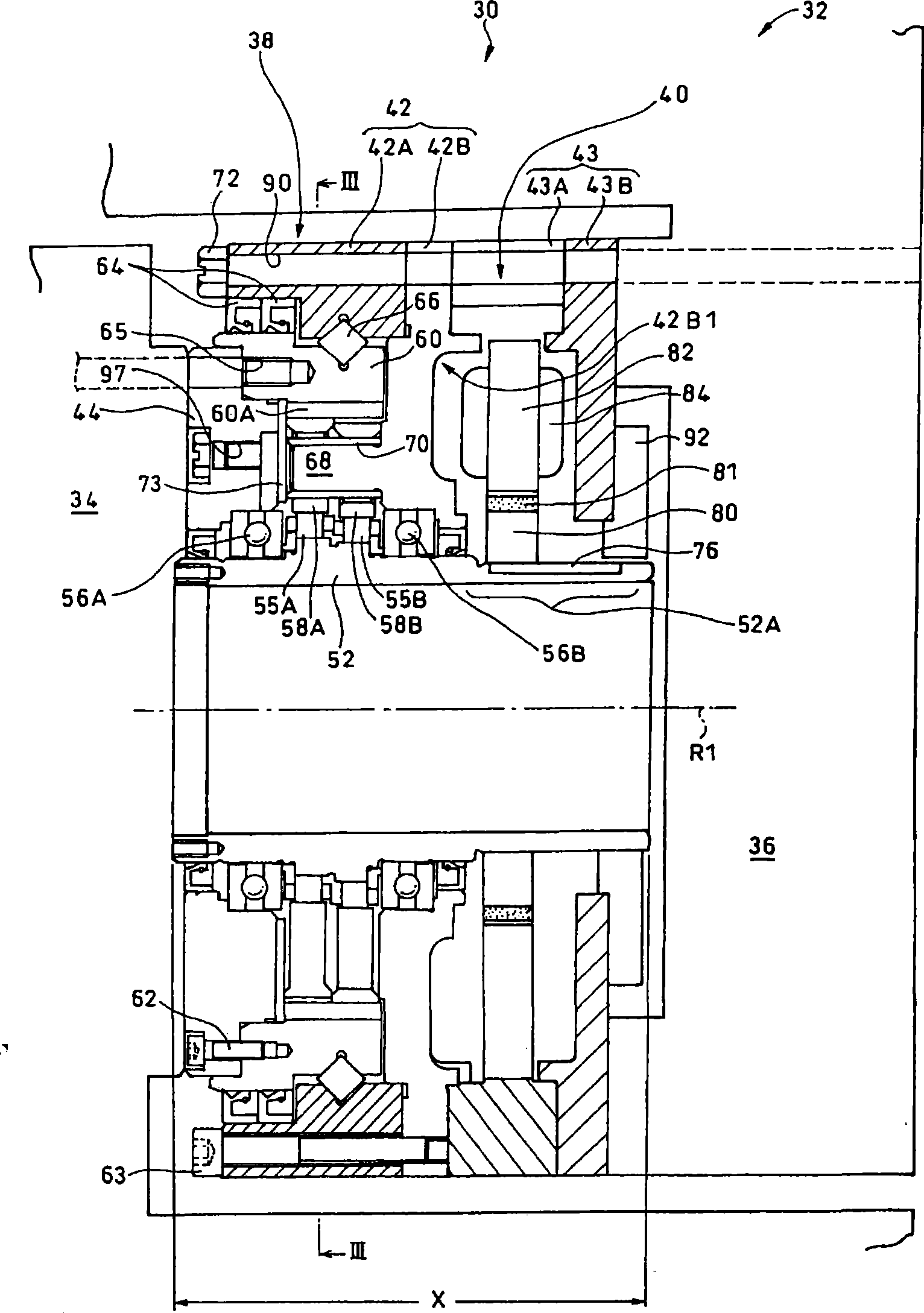
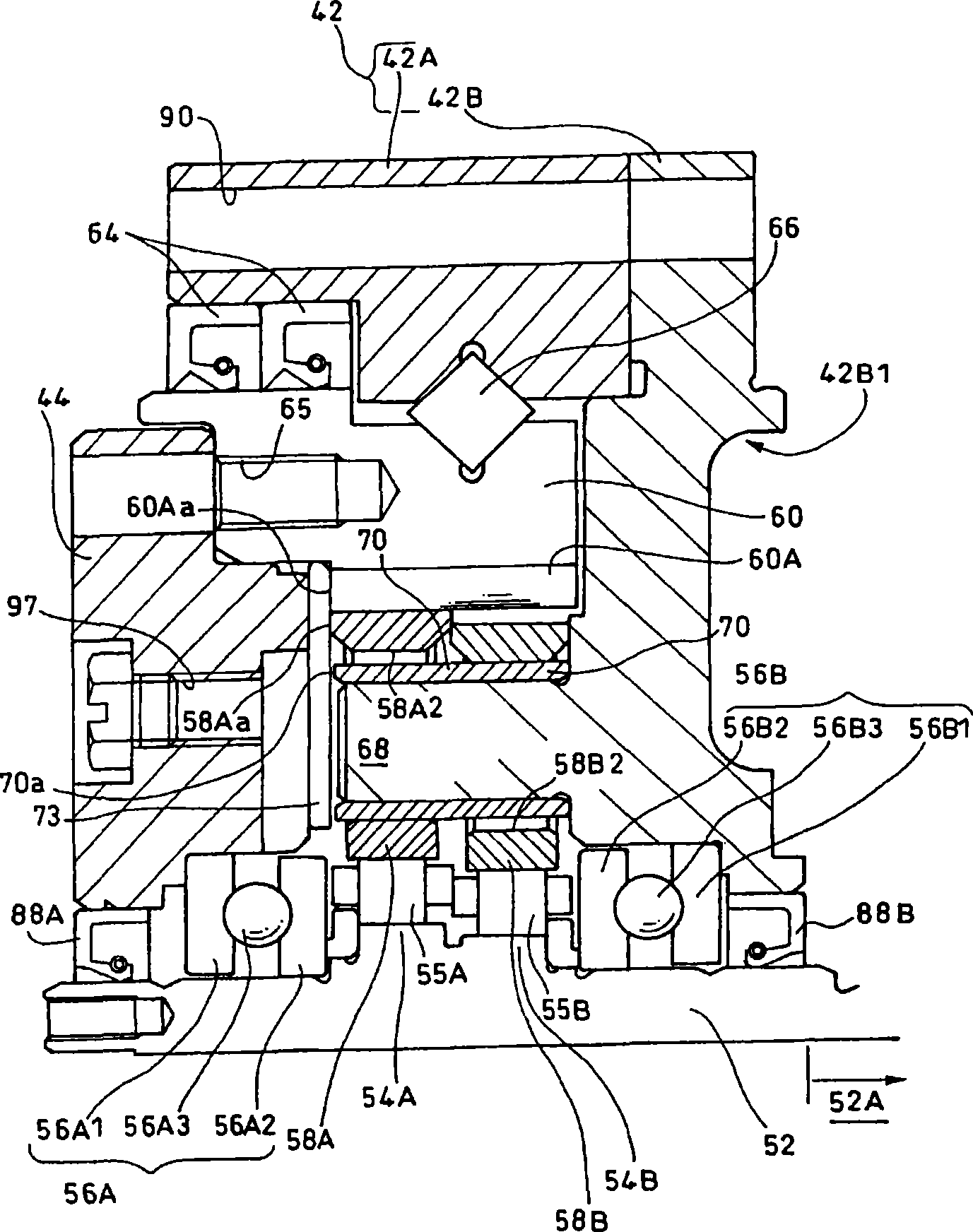
[0023] This robot joint driving device 30 has a speed reducer 38 and a flat motor 40, and drives a first member 34 and a second member 36 of an arm 32 of a robot (not shown in its entirety) to rotate relative to each other. The first member 34 is fixed to an output flange (output shaft) 44 of the speed reducer 38 . The speed reducer case 42 is fixed to the second member 36 via the motor case 43 . The output flange 44 of the speed reducer 38 is relatively rotatable around the rotation axis R1 with respect to the speed reducer case 42 . Therefore, as a result, the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More