

Neural network generalized inverse permanent magnetism synchronous machine decoupling controller structure method without bearing
A permanent magnet synchronous motor, decoupling controller technology, applied in motor generator control, biological neural network model, electronic commutation motor control and other directions, can solve open-loop instability, unstable performance, complex closed-loop control system, etc. problems to ensure stable suspension and operation and improve robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
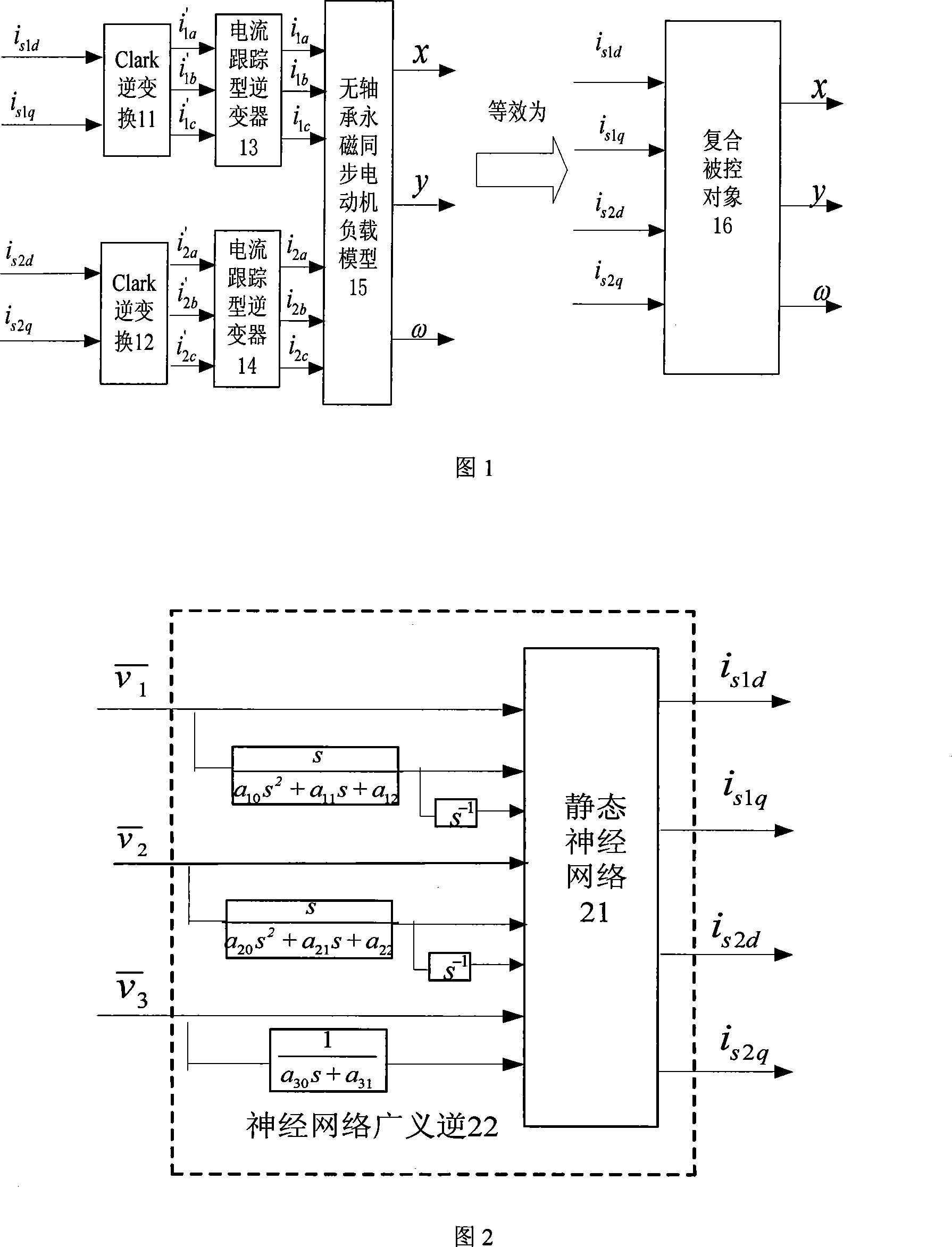
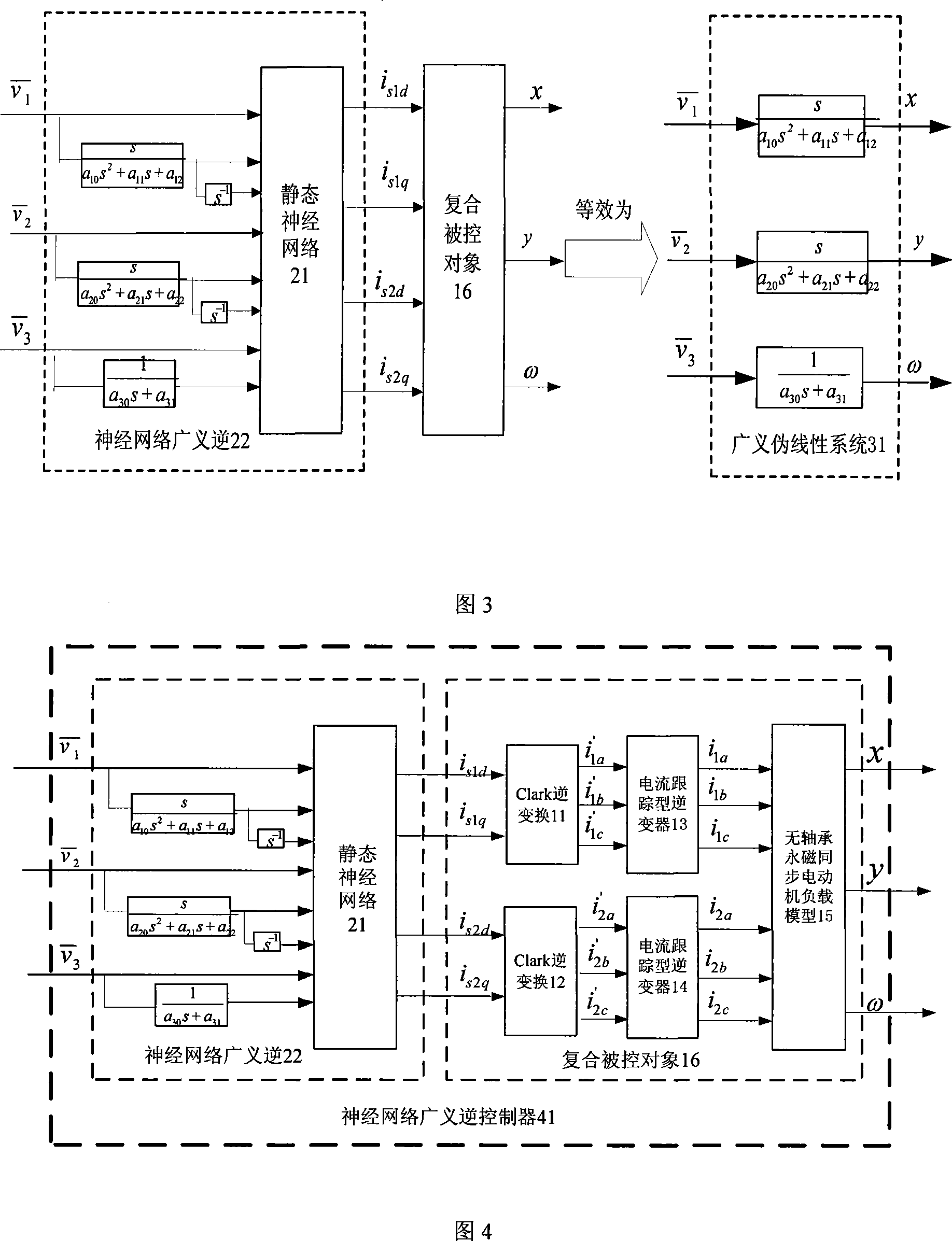
[0020]The embodiment of the present invention is: first based on the prototype body of the bearingless permanent magnet synchronous motor, and then composed of two Clark inverse transforms, two current tracking inverters and the load of the bearingless permanent magnet synchronous motor as a whole to form a composite controlled object , the compound controlled object is equivalent to a 5th-order differential equation model in the stationary coordinate system, and the relative order of the system vector is {2, 2, 1}. A neural network generalized inverse of a compound controlled object with 8 input nodes and 4 output nodes is formed by using a static neural network (3-layer network) with 8 input nodes and 4 output nodes and linear links such as integral and inertia. And by adjusting the weights of the static neural network, the generalized inverse of the neural network realizes the function of the generalized inverse system of the compound controlled object. Then, the neural net...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More