

High-precision magnetic bearing axial control method based on interference observer
A technology of disturbance observer and control method, applied in the direction of control using feedback, bearings, shafts and bearings, etc., can solve the problems of inability to analyze disturbances in real time, failure to suppress, lack of disturbance records and quantitative analysis, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
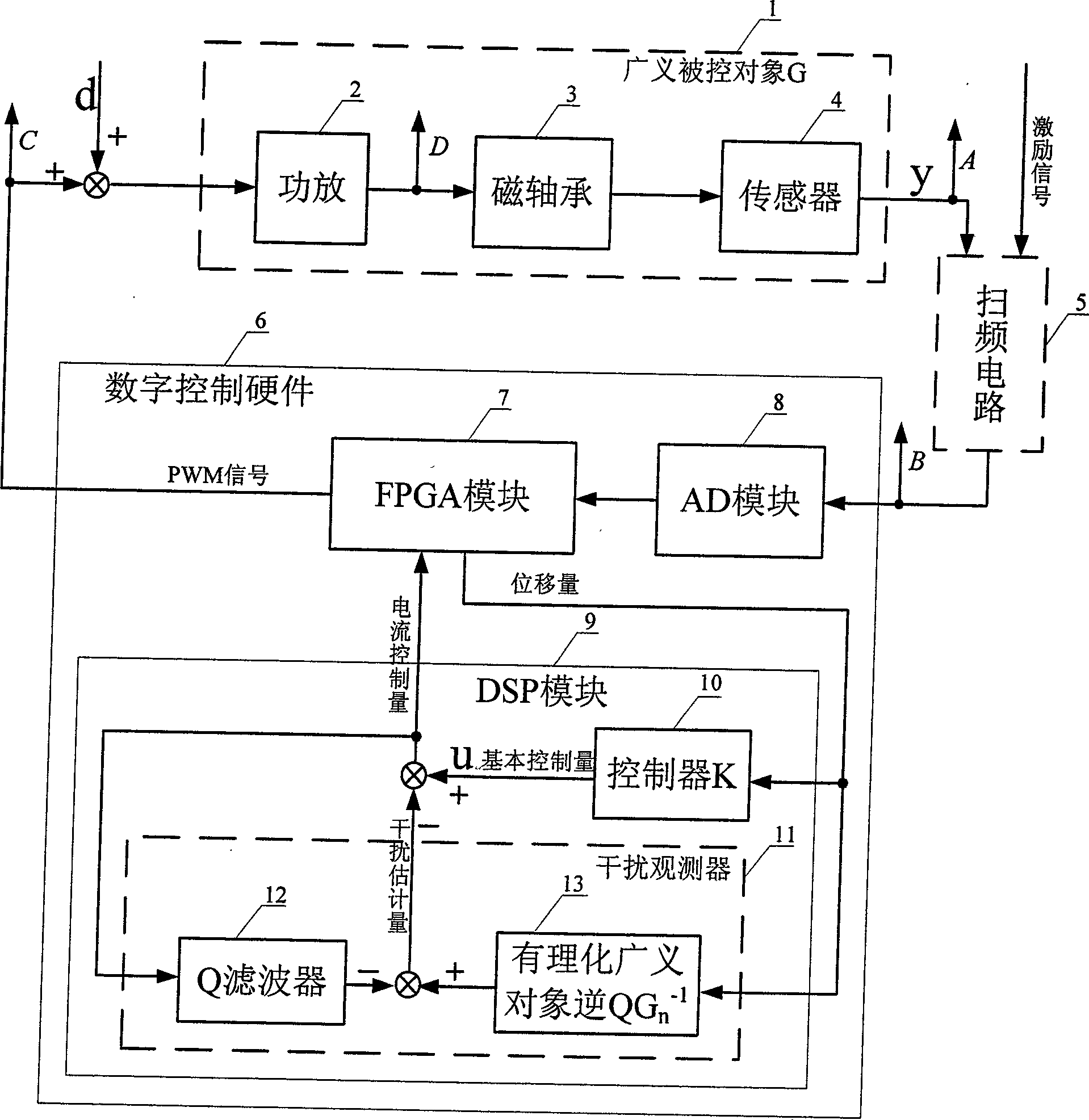
[0049] Such as figure 1 Shown, the system that realizes the method of the present invention comprises frequency sweep circuit 5 and digital control hardware 6, and wherein digital control hardware 6 comprises A / D module 8, DSP module 9 and FPGA module 7; Superimposed with the excitation signal, it is transmitted to the A / D module 8, and the FPGA module 7 receives the digital quantity converted by the A / D module 8, and then sends it to the DSP module 9, and the DSP module 9 uses the interference observer algorithm to calculate the current control value, and then transmits to the FPGA module 7, and then the FPGA module 7 converts the current control amount into a PWM form output, drives the power amplifier 2 to generate electromagnetic force to act on the magnetic bearing, and realizes the levitation function.
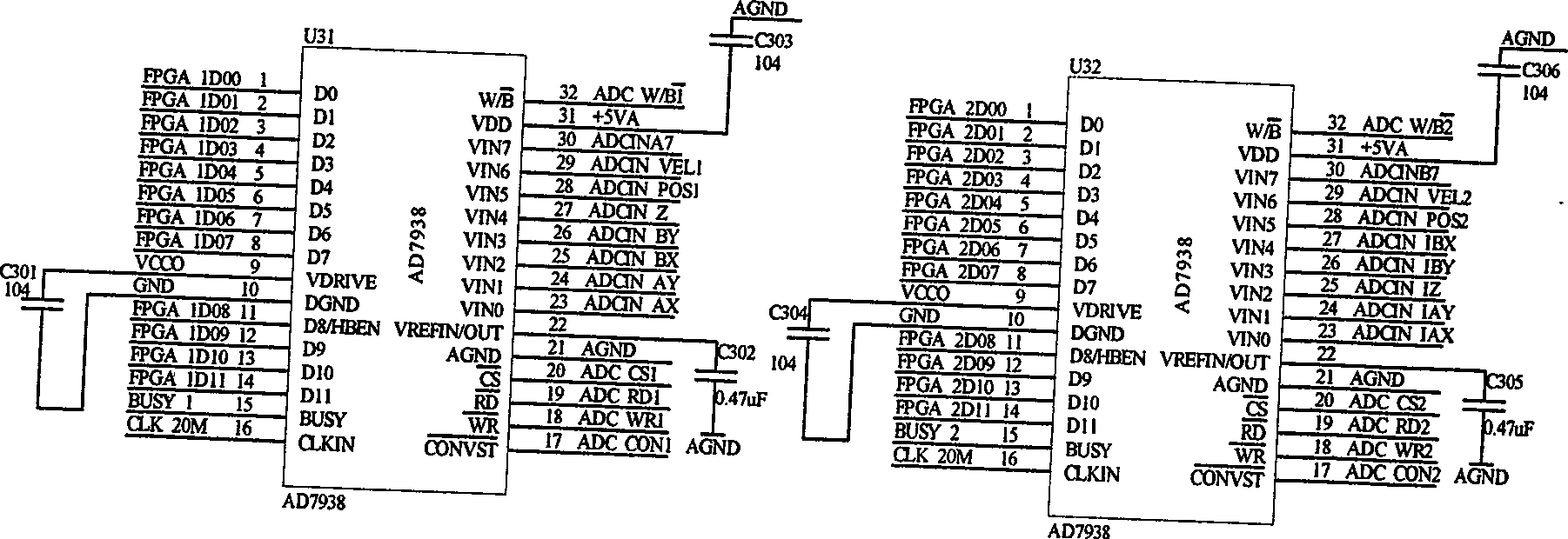
[0050] Such as figure 2 Shown is a schematic diagram of the A / D module 8 of the present invention, and the A / D module 8 is used to collect displacement values and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More