

Acquisition method of three freedom-degree transportation industrial robot multiple-objective optimization design parameter
An industrial robot and multi-objective optimization technology, which is applied in the field of acquisition of multi-objective optimization design parameters of three-degree-of-freedom handling industrial robots, can solve problems such as inability to take into account design indicators and affect the overall performance of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
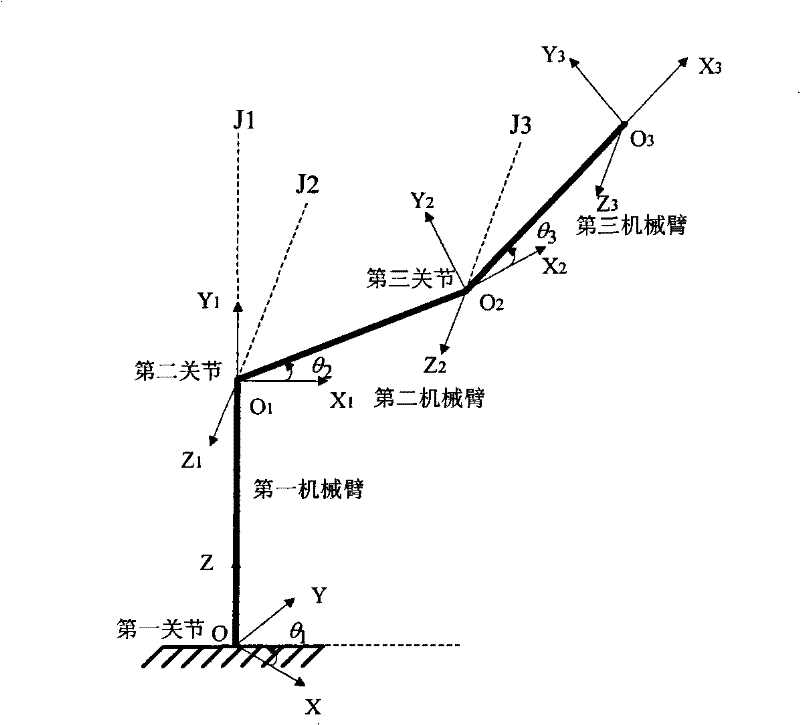
[0231] 1. A method for obtaining multi-objective optimal design parameters of a three-degree-of-freedom transporting industrial robot, wherein the three-degree-of-freedom transporting industrial robot comprises: a first mechanical arm (1), a second mechanical arm (2) and a third mechanical arm (3), the two ends of the second mechanical arm (2) are rotationally connected with one end of the first mechanical arm (1) and one end of the third mechanical arm (3) respectively, and it is characterized in that the acquisition method of the multi-objective optimization design parameters includes The following steps:
[0232] Step 1 First, establish the link coordinate system of the three-degree-of-freedom manipulator, such as figure 1 shown; from the kinematics equation of the manipulator, the trajectory of the end working point can be obtained as Let the range of each rotation angle be designed as -π≤θ 1 ≤π, -π≤θ 2 ≤π, -π≤θ 3 ≤π, the working space of the manipulator is a cluster ...
Embodiment 2
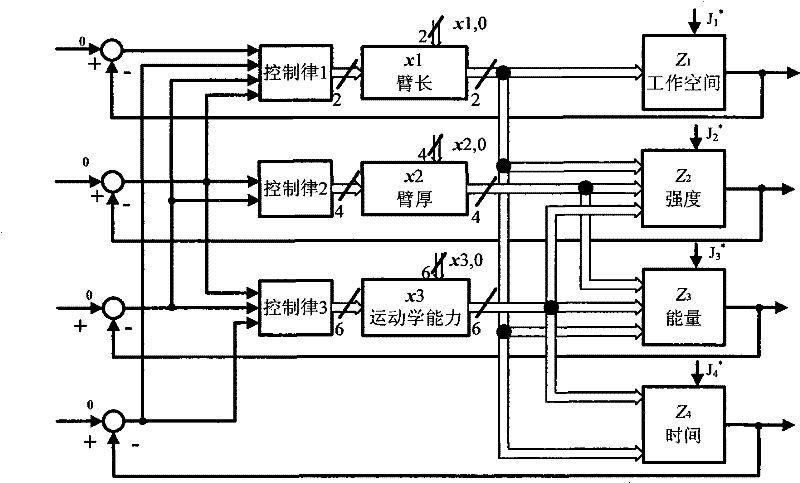
[0416] The basic design requirements for a three-degree-of-freedom handling robot are: the working space of the three-degree-of-freedom industrial robot is centered at (0, 0, 1), and the maximum radius R max =1.5, minimum radius R min =0.2 of the part between the two balls (unit: m). The maximum load required to be transported is 25kg. On this basis, it is required to maximize the working space, meet the material requirements for strength, and optimize the energy and time performance of the manipulator control process.
[0417] For the three-degree-of-freedom handling robot in this design, through the analysis of the third chapter, 12 parameters representing the mechanical design parameters and the performance parameters of the reaction motor are determined as the design variables of the whole design process. At the same time, for the mechanical parameter l of the mechanical arm 1 1 , R 1 、r 1 , and the lumen parameter h of manipulators 2 and 3 2e , b 2e 、h 3e , b 3e ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More