

Stepper for juxtaposedly pushing three or four piezoelectrics and scanning probe microscope body thereof
A technology of piezoelectric scanning tube and piezoelectric body, applied in the direction of electric solid devices, piezoelectric devices/electrostrictive devices, semiconductor devices, etc., can solve the problem of large working temperature range, large driving force, and nanometer precision stepper size Small and other problems, to achieve the effect of large working temperature zone, large driving force, simple and firm structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] Embodiment 1: Stepper with parallel propulsion of basic three piezoelectric bodies
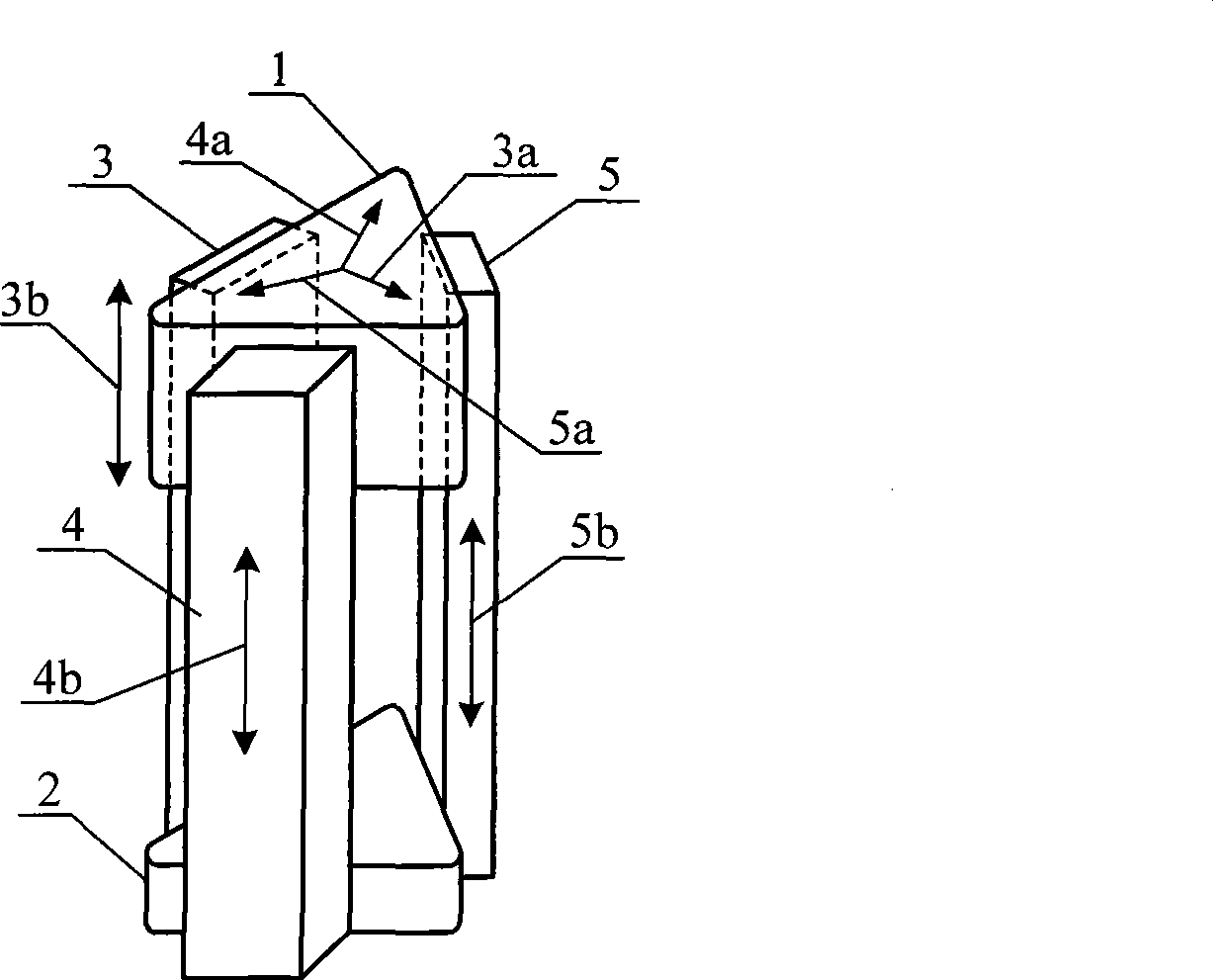
[0059] see figure 1 , a basic stepper with three piezoelectric bodies in parallel, including a slider 1, a base 2 and three piezoelectric bodies: piezoelectric body 1 3, piezoelectric body 2 4 and piezoelectric body 3 5, characterized by The three piezoelectric bodies 3, 4 and 5 are fixedly standing on the base 2 in a triangular arrangement parallel to the expansion and contraction directions 3b, 4b and 5b, and are arranged in the same direction as the three piezoelectric bodies 3, 4 and 5 in the expansion and contraction direction. The upper part is the sliding block 1, and the positive pressure 3a that presses the free ends of the three piezoelectric bodies 3, 4, and 5 against the sliding block 1 is set in the direction perpendicular to the expansion and contraction of the three piezoelectric bodies 3, 4, and 5. , 4a and 5a, among the maximum static friction forces generated by the t...
Embodiment 2
[0063]Embodiment 2: A stepper for parallel propulsion of elastic tri-piezoelectric bodies
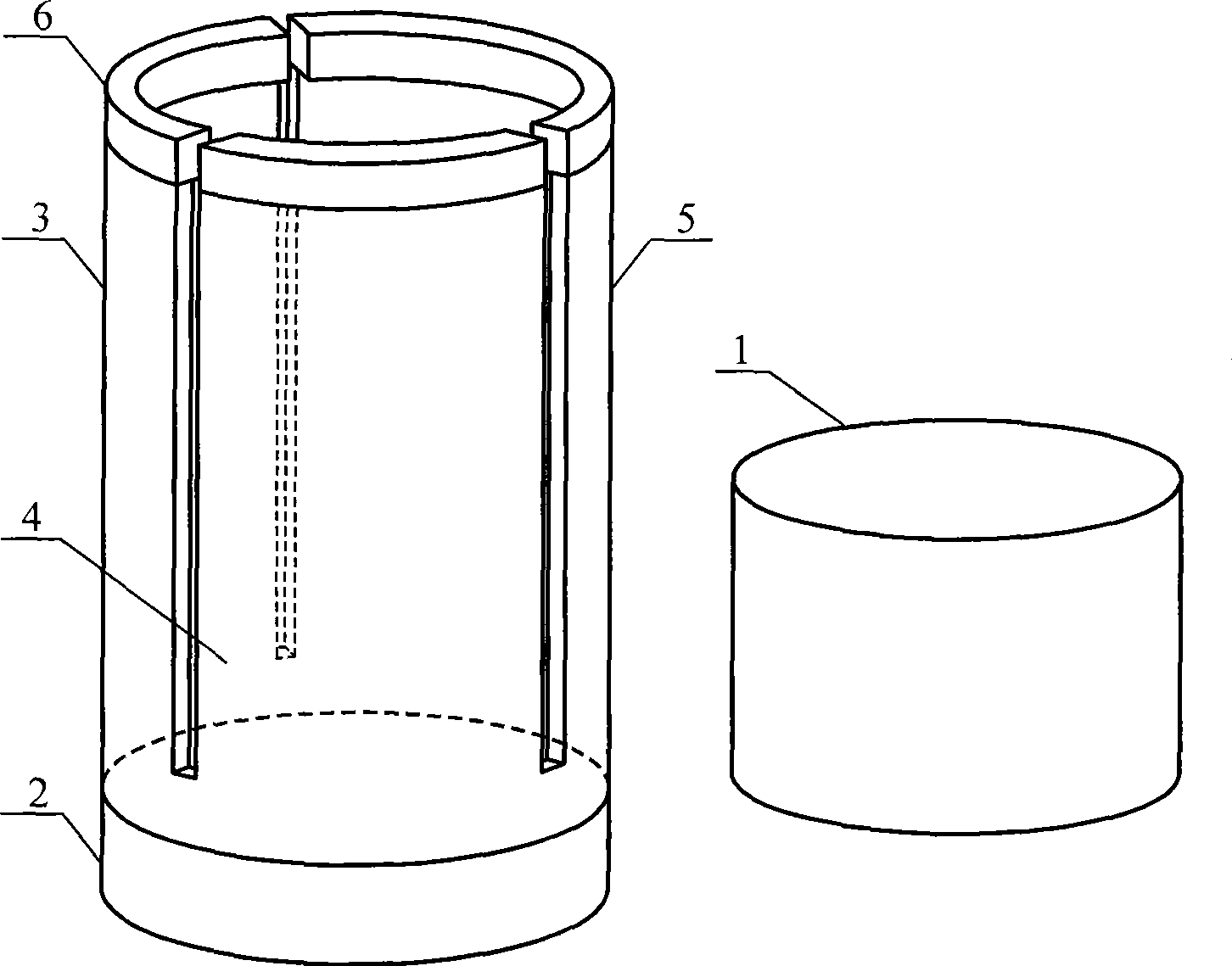
[0064] In Embodiment 1, the positive pressures 3a, 4a and 5a that press the slider 1 and the free ends of the three piezoelectric bodies 3, 4 and 5 can be passed through the elasticity of the slider 1 itself (for example, attached Figure 4 The tubular slider cut in the center) and / or the elasticity of the three piezoelectric bodies 3, 4 and 5 themselves and / or the addition of elastic bodies (for example, in the attached Figure 4 Place the spring in the cut tubular slider) to achieve.
Embodiment 3
[0065] Embodiment 3: A stepper for parallel propulsion of integral type three piezoelectric bodies
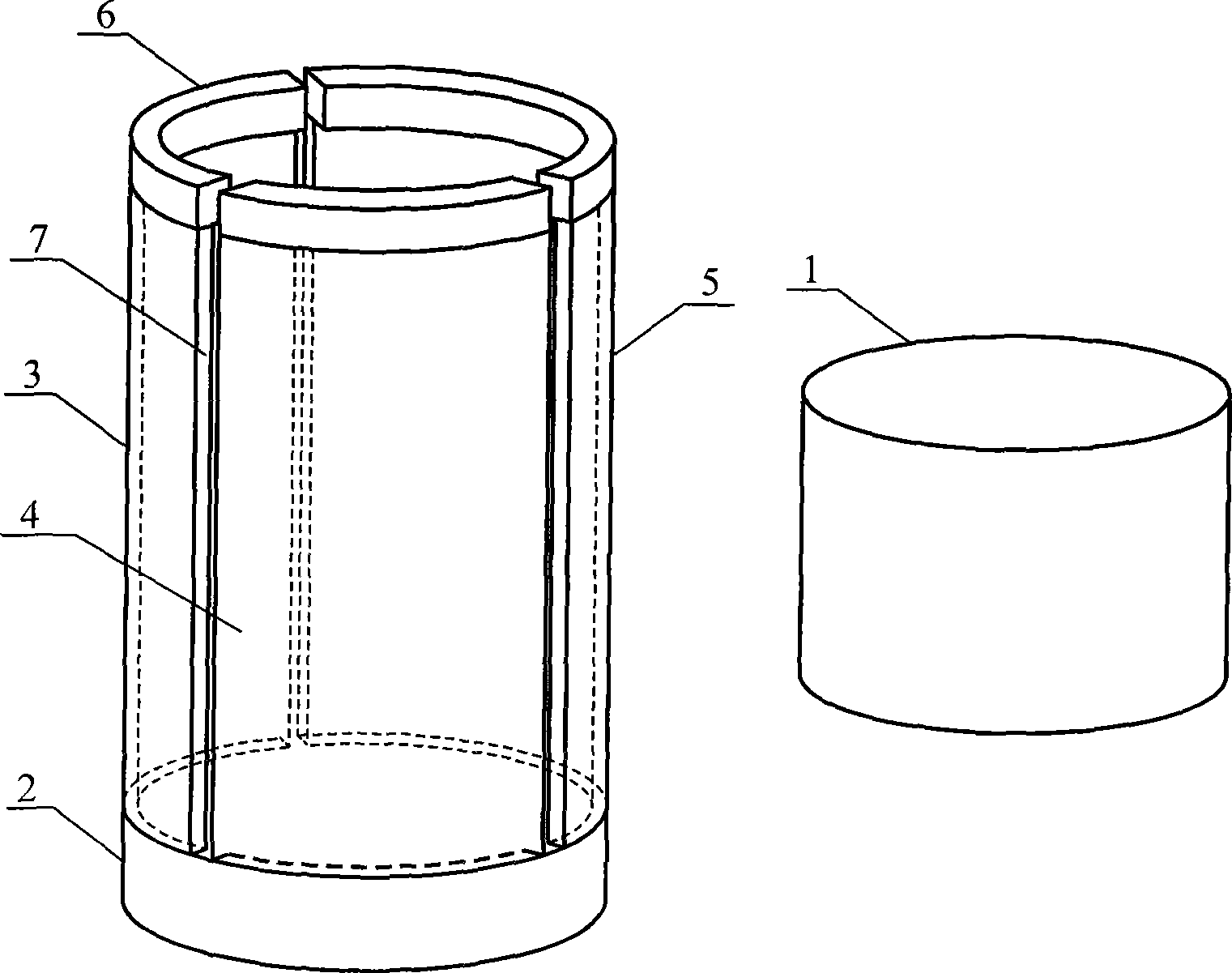
[0066] The three piezoelectric bodies 3, 4 and 5 in the above embodiment can be different parts of a complete piezoelectric body, and the three piezoelectric bodies 3, 4 and 5 can also form a complete piezoelectric body with the base 2. Different parts of the electric body can be realized by dividing the electrodes and cutting the piezoelectric body, as long as the expansion and contraction of the three piezoelectric bodies 3, 4 and 5 are independently controllable. For example, the outer electrode of a complete cylindrical piezoelectric tube is divided into three third cylindrical electrodes along the axial direction, and then the piezoelectric tube is cut along the gap between the three electrodes but not completely cut, so that the piezoelectric tube The three cut parts of the electric tube constitute the three piezoelectric bodies 3, 4 and 5, and the uncut part can be regar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More