

Control device for brushless direct current motor sensorless based on 12-beat control and method thereof
A brush DC motor and control device technology, which is applied in the direction of output power conversion device, control system, electronic commutator, etc., can solve the problem of high-performance occasions where the 120° conduction-type square wave driving method cannot be applied, increase system volume and Cost, complex control algorithm and other issues, to achieve the effect of large output, low cost, small torque ripple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
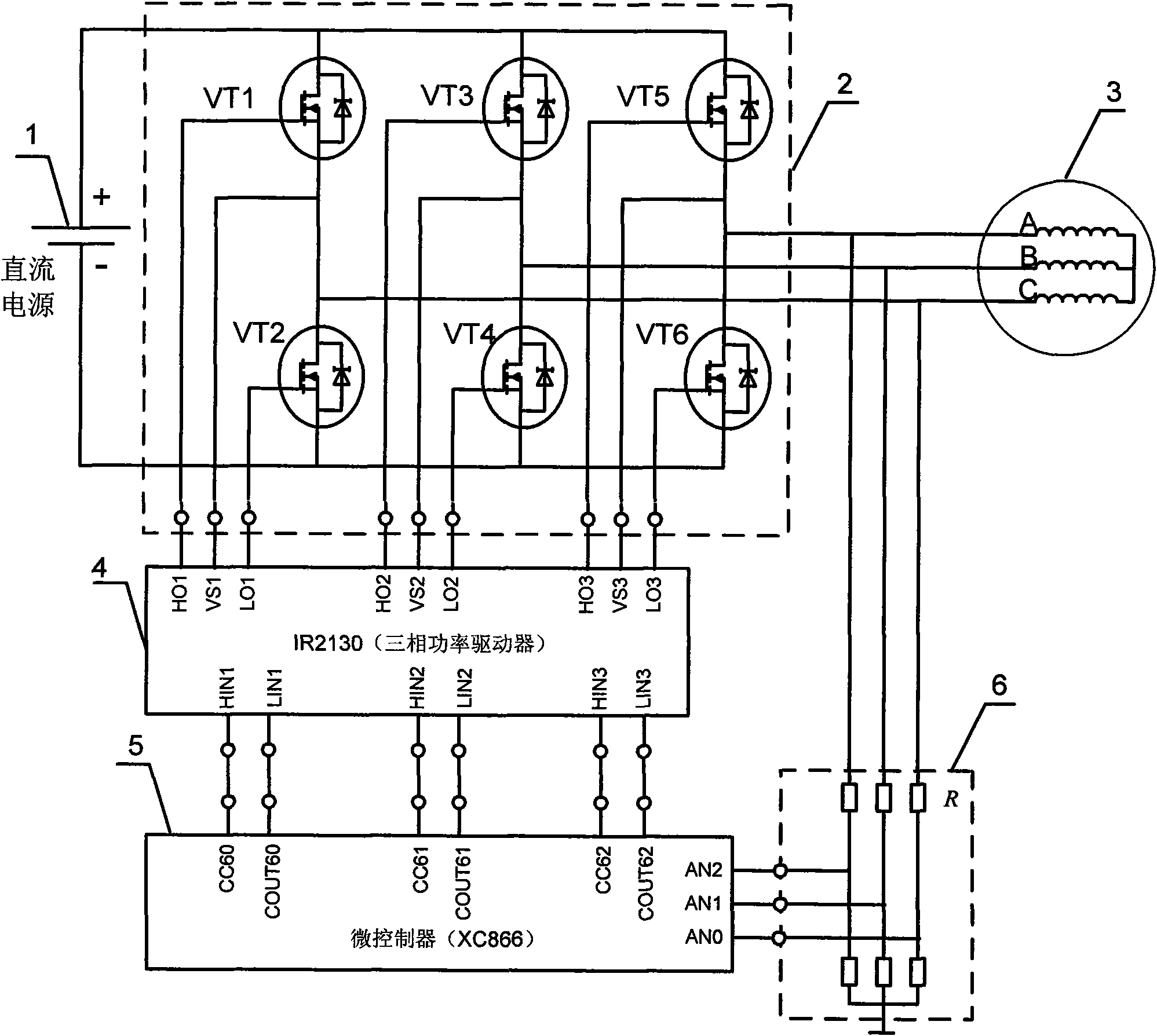
[0012] Preferred embodiments of the present invention are described as follows in conjunction with the accompanying drawings: see image 3 , the brushless DC motor position sensorless control device based on 12-beat control includes a DC power supply 1, a three-phase inverter 2, a brushless DC motor 3, a three-phase inverter power device drive circuit 4, a microcontroller 5 and Rotor position detection circuit 6. The DC power supply 1 is connected to the brushless DC motor 3 through the three-phase inverter 2; the rotor position detection circuit 6 is connected to the brushless DC motor 3 for detection and the output signal is directly connected to the analog-to-digital conversion input pin of the microcontroller 5; The six outputs of the microcontroller 5 are connected to the three-phase inverter 2 through the three-phase inverter power device driving circuit 4 . The driving circuit 4 of the power device of the three-phase inverter adopts an IR2130 type chip, and the microco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More