

Method for realizing machine tool motion control by utilizing subroutine call
A motion control and subprogram technology, which is applied in the field of machine tool motion control using subprogram calls, can solve the problems of bloated programs, time-consuming and laborious, and increase the workload of programmers, and achieve the effect of real-time modification and convenience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
[0022] The method of the present invention is concrete in implementation process, and its operation environment is: numerical control software adopts C++ language to write, and corresponding editing environment is VC++, and subroutine adopts G code file format to be written in the text document, can run in WindowsXP and Windows2000.
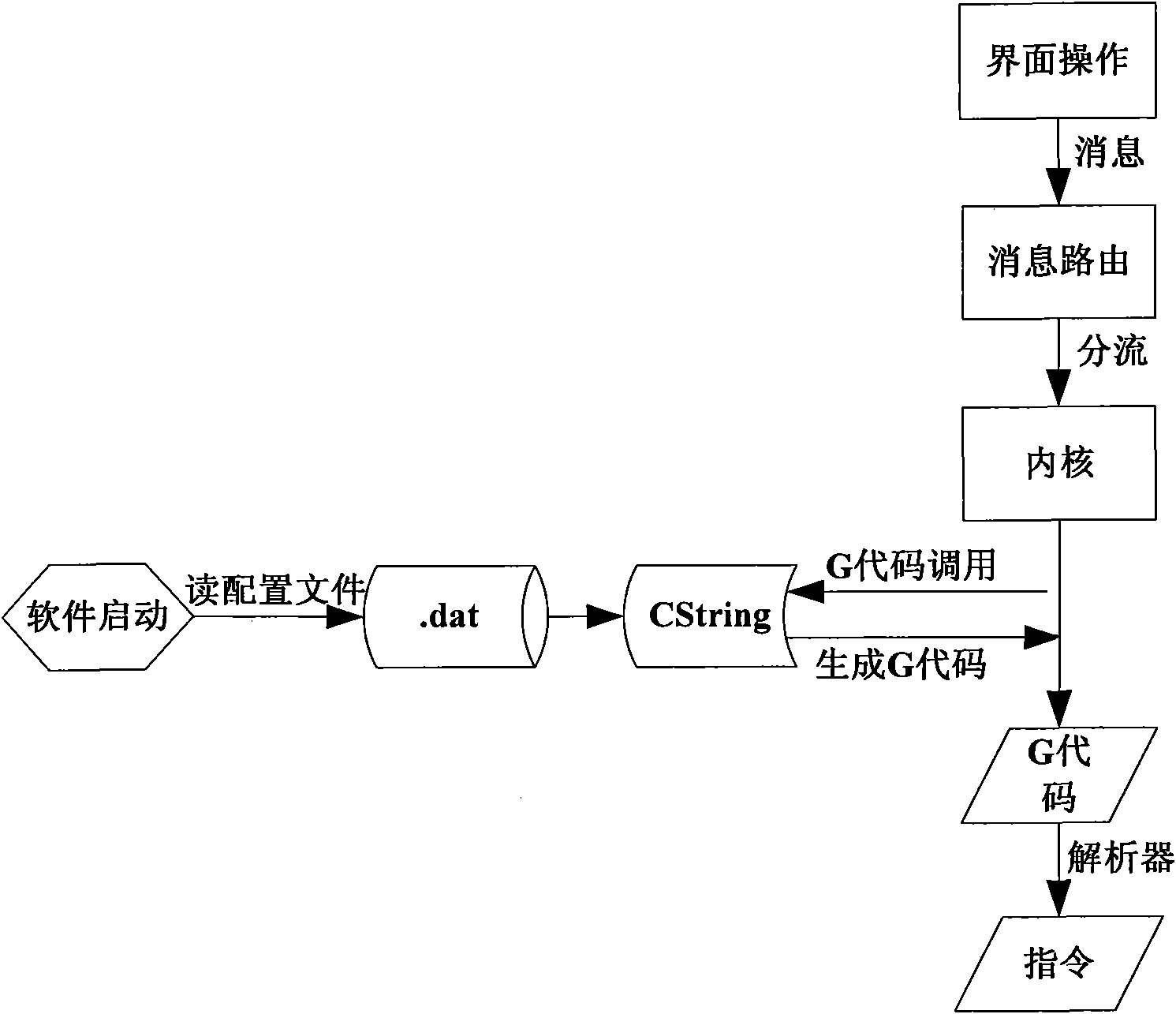
[0023] see figure 1 , the specific implementation steps are:
[0024] 1: the G code subroutine text file (usually .ini, .dat file, which is set to .dat file in the present invention) provided by the machine tool manufacturer. The .dat file is placed under the specified folder target.
[0025] 2: When the system starts, the main program first reads the .dat file into the cache, saves the CString structure, and enca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More