

Position control method for vibration attenuation and apparatus thereof
A technology of positioning control and feedback control, which is applied in the direction of mechanical oscillation control, non-electric variable control, control/regulation system, etc., can solve the problem of deviation between the model and the actual action, and achieve the effect of improving the vibration stop accuracy and reducing the response characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Next, preferred embodiments of the present invention will be described with reference to the drawings. In addition, in each figure, the same code|symbol is attached|subjected to the common part, and overlapping description is abbreviate|omitted.
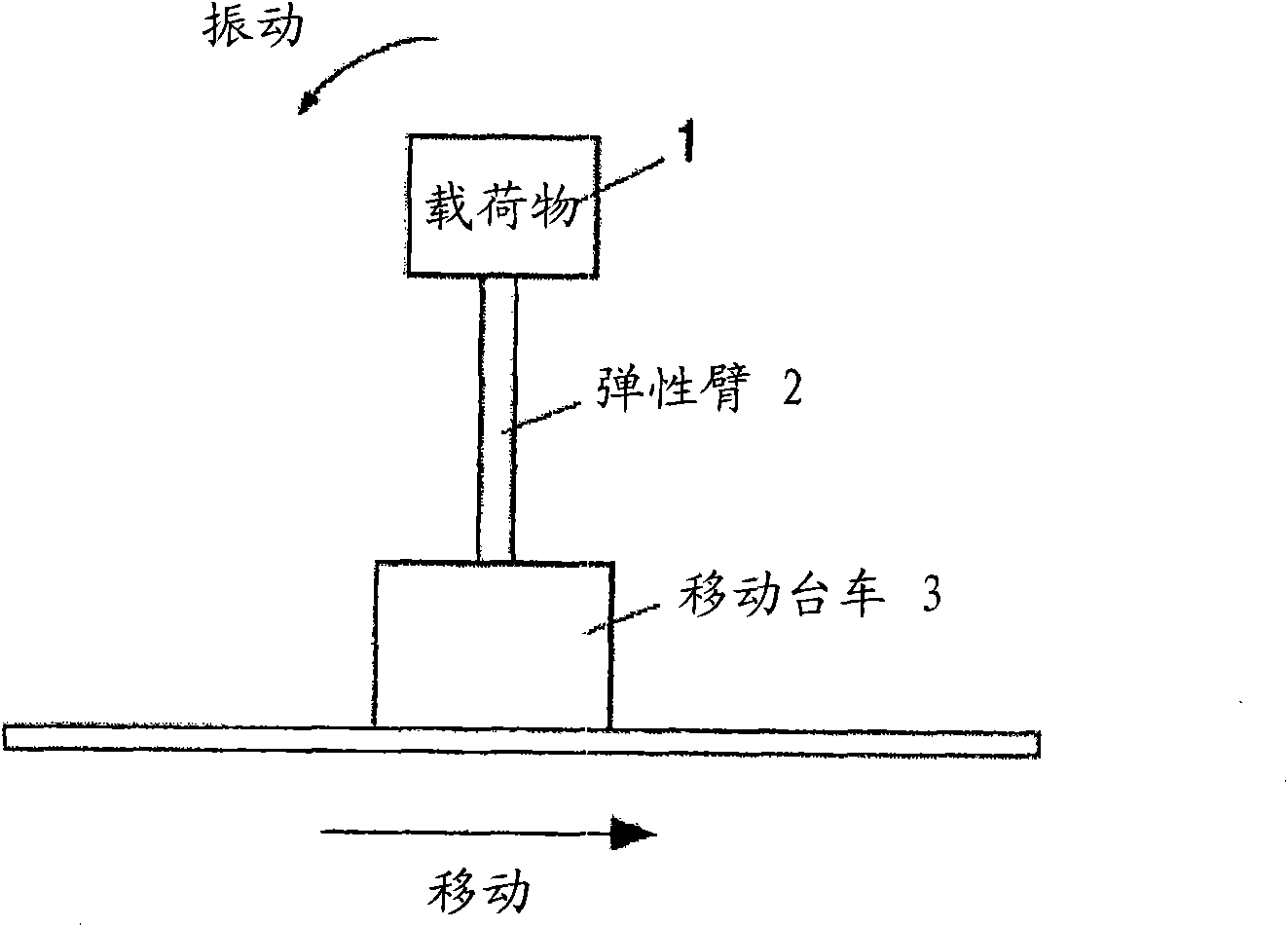
[0057] Figure 4 yes image 3 A model diagram of the moving body shown. In this mobile object model, a load 1 with a mass m is fixed to a mobile cart 3 via an elastic arm 2 with a length L. As shown in FIG.
[0058] Here, k is the coefficient of elasticity, θ is the angle, M is the mass of the trolley, f is the driving force, and g is the acceleration due to gravity.
[0059] Furthermore, the mobile trolley 3 calculates the state variable (described later) of the measuring load 1 in real time by means of the vibration damping positioning control device 10 of the present invention, and performs feedback control in a closed loop.
[0060] The kinetic energy V of this model is expressed by the formula (1) of the number 1, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More