

Device and method for making robot track given route at high accuracy
A technology of specifying paths and robots, which is applied in the field of tracking compensation, can solve problems such as low hardware requirements, tool center point positioning accuracy that cannot meet laser welding requirements, etc., and achieve high tracking accuracy, cost reduction, and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
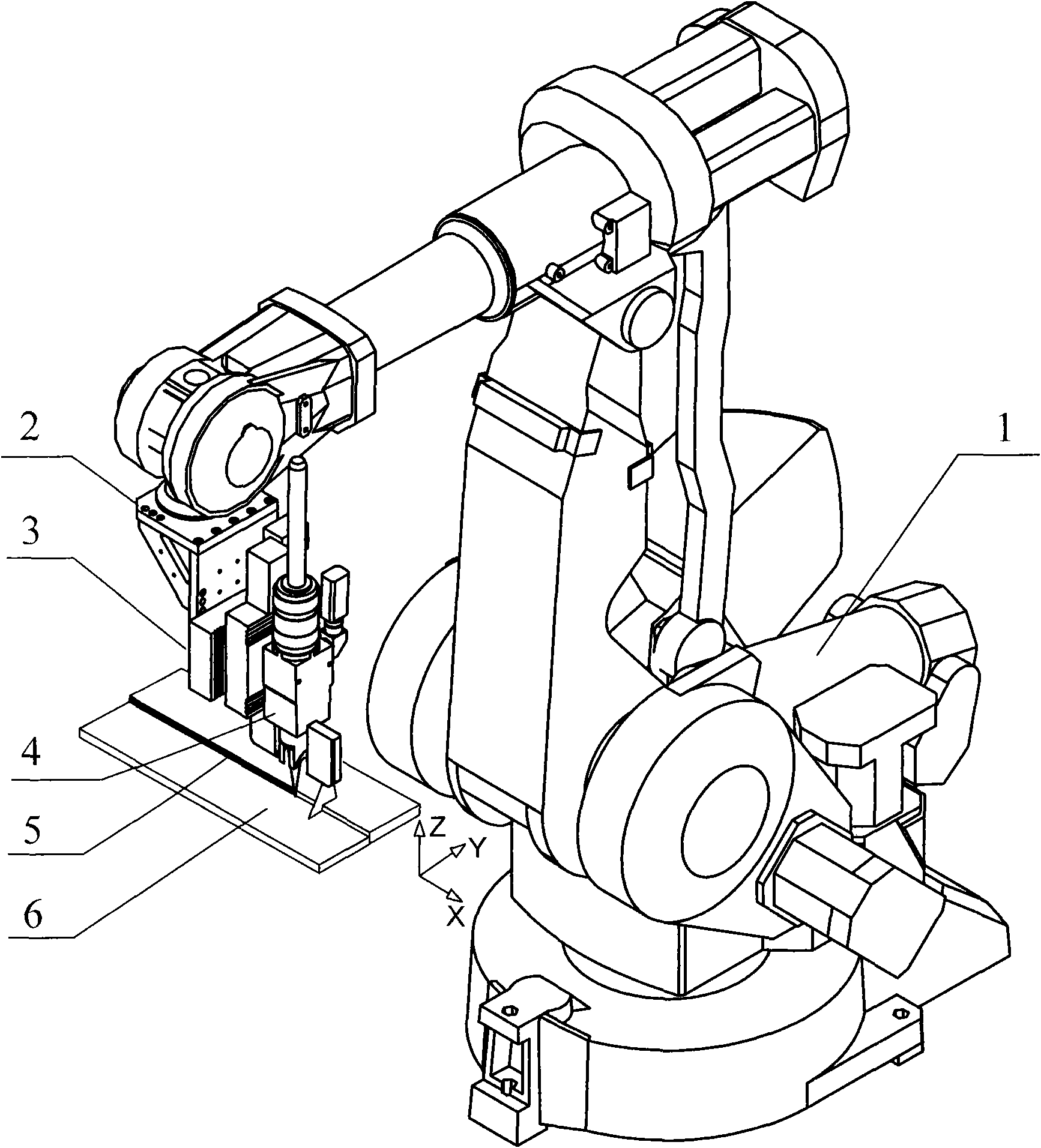
[0051] Such as figure 1 As shown, a device for enabling a robot to track a specified path with high precision is mainly composed of a robot body 1 , a tool holder 2 , a position correction device 3 and a laser processing head unit 4 . The laser processing head unit 4 is installed on the position correction device 3 , the position correction device 3 is installed on the tool support 2 , and the tool support 2 is installed at the end of the robot body 1 . The robot initially positions the laser processing head unit above the welding seam 5 of the welding material 6 .
[0052] Such as figure 1 , figure 2 As shown, in order to facilitate the description of the present invention, the forward direction of the weld seam is defined as the positive direction of the X-axis, the axis of the laser processing head is the direction of the Z-axis, and the direction of the Y-axis is defined according to the right-hand rule.
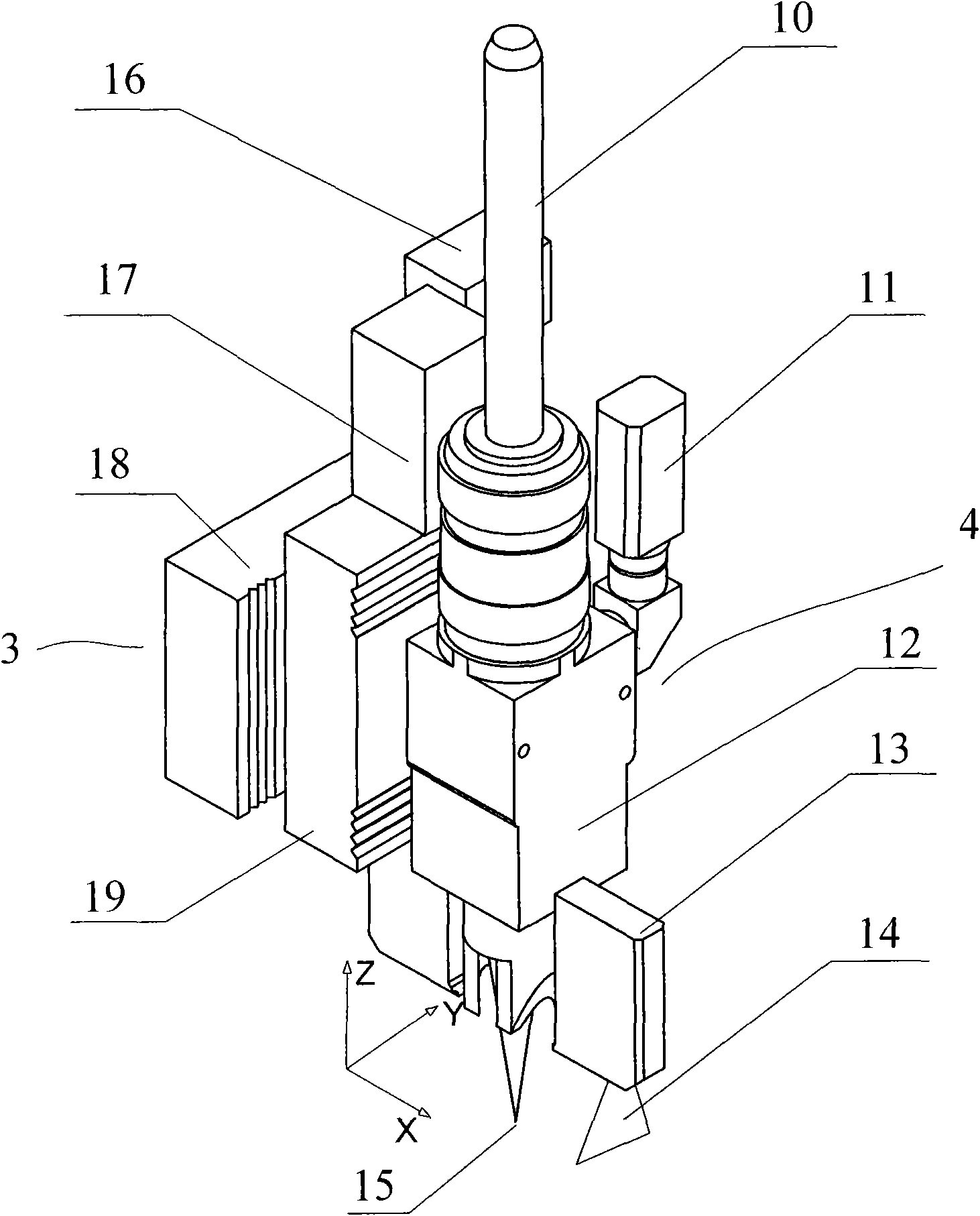
[0053] Such as figure 2 As shown, the laser processing head u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More