

Robot arm
A technology of a robotic arm and a rear arm, applied in the field of double robotic arm devices, can solve the problems of complex structure, inability to easily adjust down force, low overall efficiency, etc., and achieve the effects of smooth movement, improved efficiency, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Below in conjunction with accompanying drawing, the utility model feature and extremely relevant feature are further described:
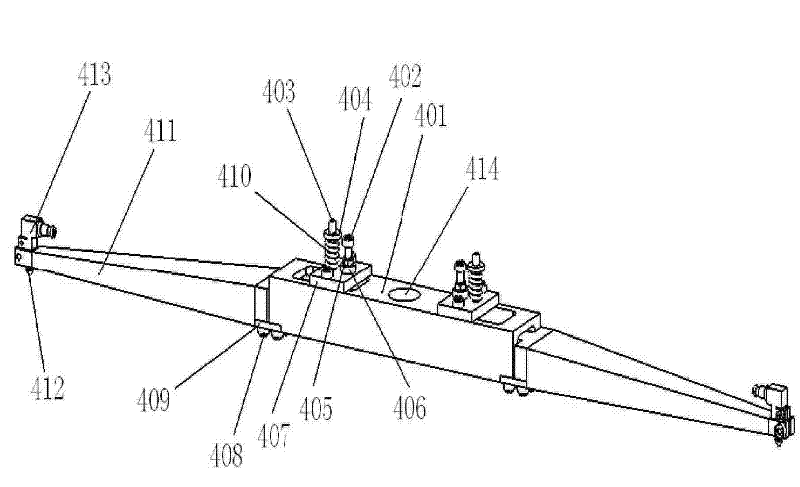
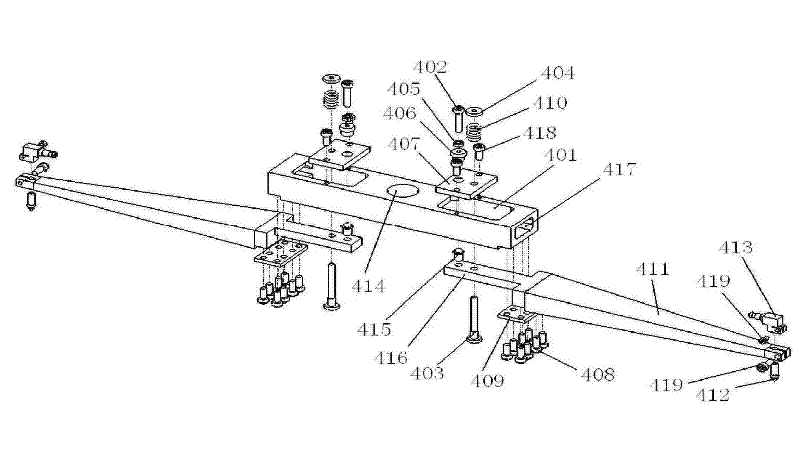
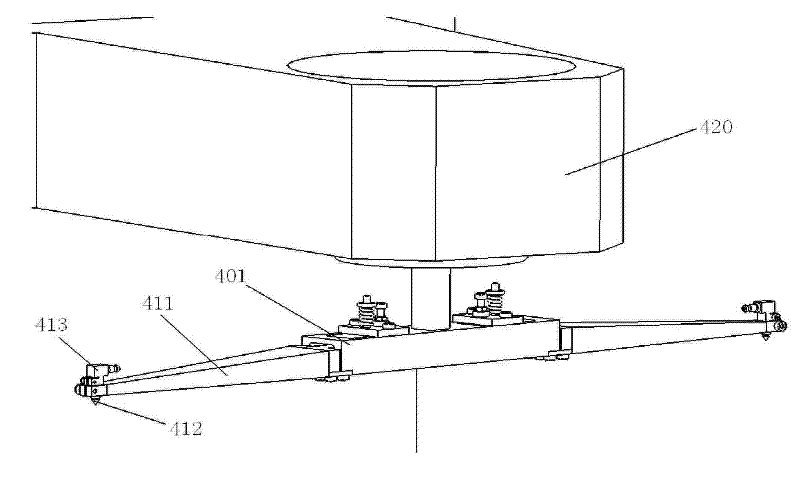
[0013] See attached Figure 1~5 As shown, the numbers in the figure are as follows: 401--rear arm, 402--rear arm electrode screw, 403--pressure adjustment rod, 404--pressure adjustment nut, 405--electrode screw nut, 406--insulation ring, 407 --support plate, 408--elastic sheet fixing screw, 409--elastic sheet, 410--spring, 411--forearm, 412--vacuum nozzle, 413--vacuum nozzle connector, 414--rear arm installation Hole, 415--forearm electrode, 416--extension of forearm rear part, 417--rear arm front end hollow, 418--support plate screw, 419--screw, 420--frame.
[0014] A kind of mechanical arm of the present invention is to install a mechanical arm mechanism on the frame 420 of the grain sorting machine or the solid crystal machine, and this kind of mechanical arm consists of a rear arm 401, a support plate 407, an insulating ring 406, and a r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More