

Surgical mechanical arm joint hydraulic locking power generator
A technology for power generators and surgical operations, which is applied to surgical robots, surgery, manipulators, etc. It can solve the problems that the surgical manipulator arm joint locking drive device has not yet been found, the joint volume and weight are large, and the mechanical arm is bulky, etc., to achieve operation and Easy maintenance, small size and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
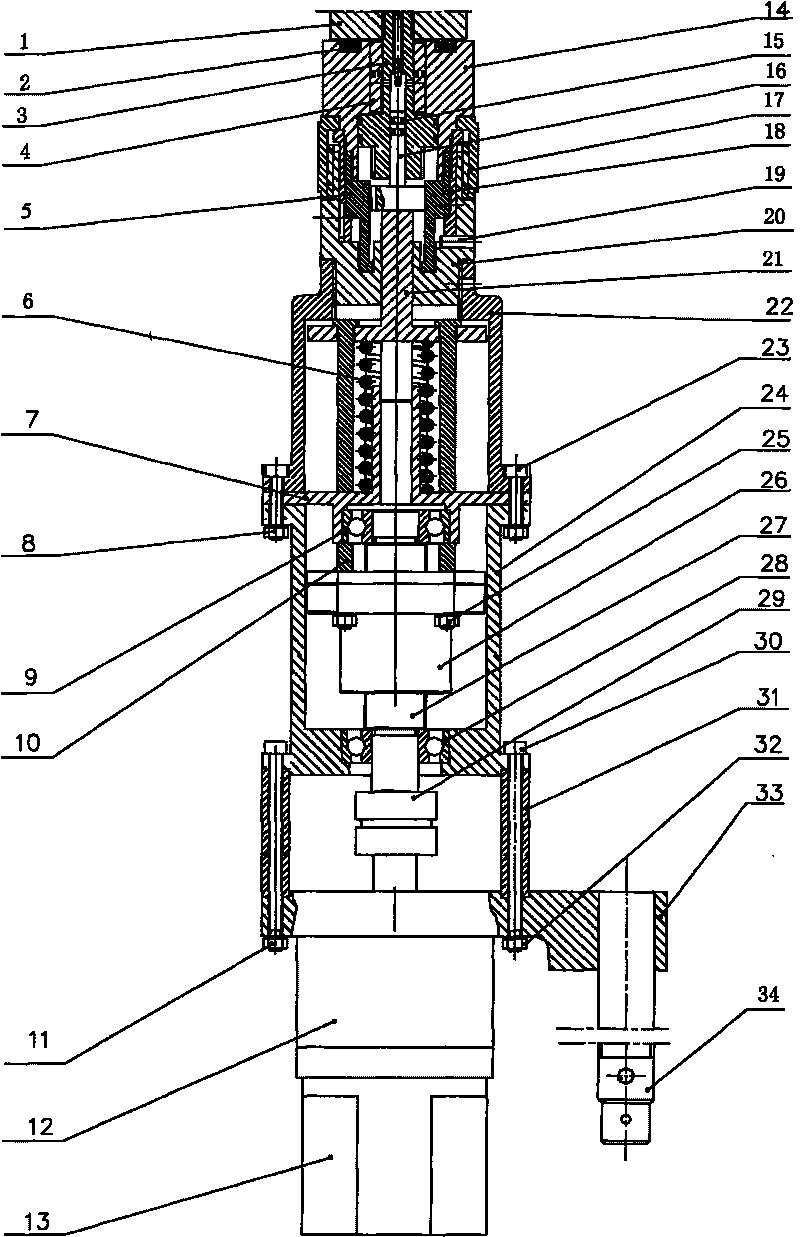
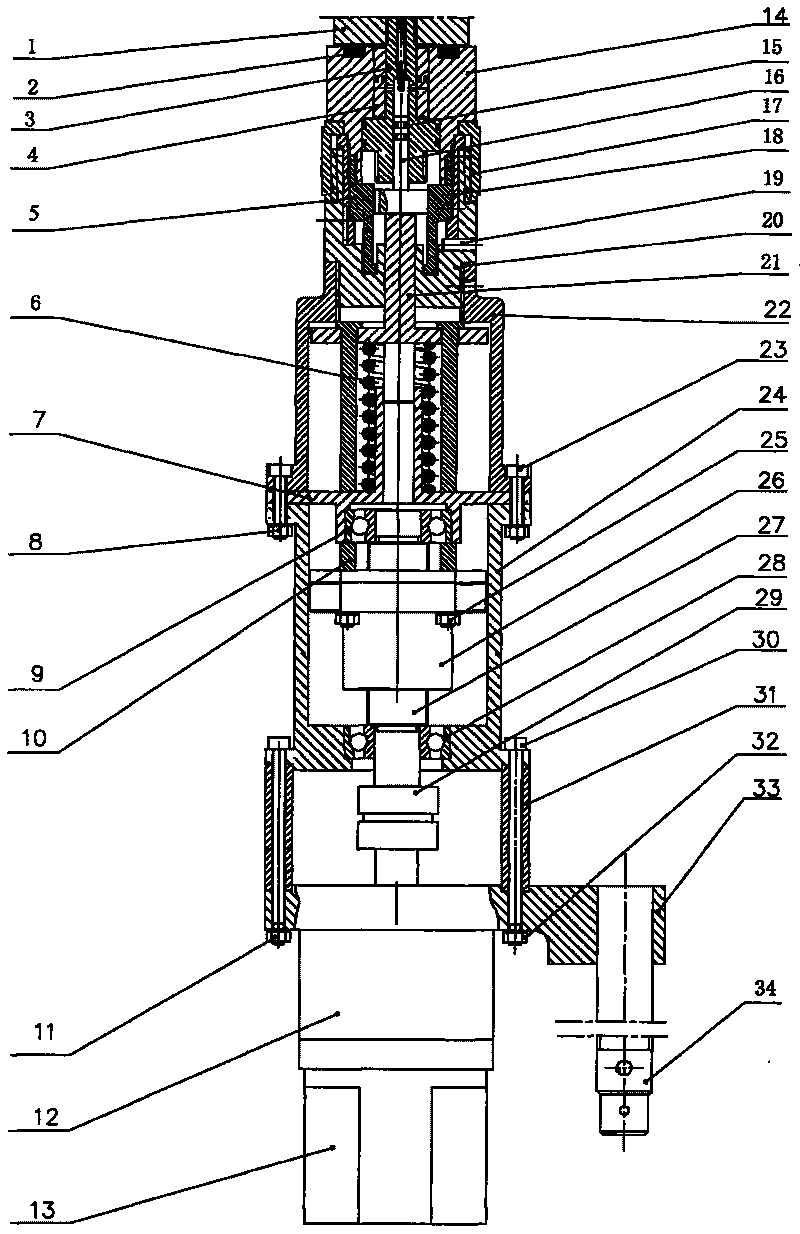
[0021] see figure 1 , the hydraulic locking power generator of the surgical manipulator arm joint of the present invention includes a support mechanism and a transmission mechanism, and it also includes an electrically controlled thrust mechanism and a force mechanism. Described thrust mechanism comprises lead screw cover 24, and described lead screw cover 24 is connected with the connecting cover 22 of transmission mechanism, and the central axis of described thrust mechanism and the axis of transmission mechanism are vertical directions; The transmission mechanisms are both symmetrical and coaxial, and are locked by loose nuts on the periphery of the force-generating mechanism, and the support mechanism is firmly connected with the thrust mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More