Method for compiling robot control program
A technology for controlling programs and compiling methods, applied in the field of program compilation, can solve problems such as the difficulty of popularizing robots, and achieve the effects of high program design efficiency, improved simplicity, and simple interaction capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013] In order to facilitate the understanding of those skilled in the art, the structural principle of the present invention will be further described in detail below in conjunction with specific embodiments and accompanying drawings:
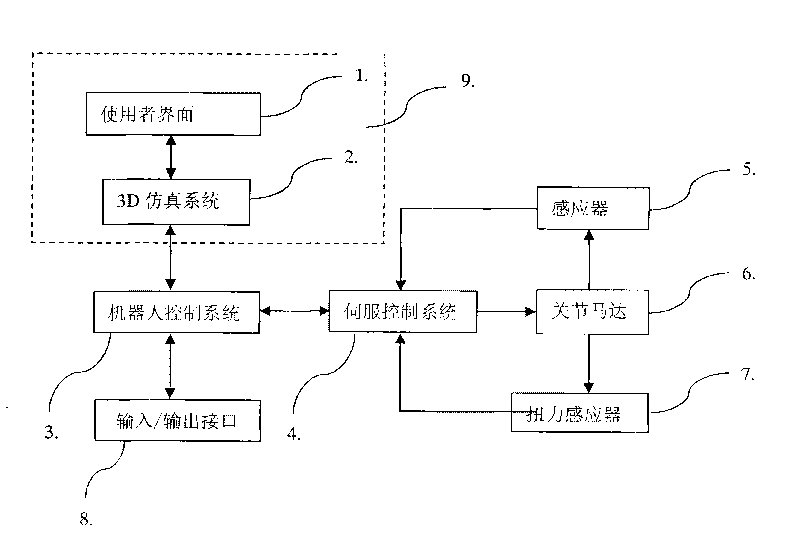
[0014] The robot control program compiling method disclosed in this embodiment is used to compile the program to control the robot’s action. Based on the theory of robot kinematics, the closed-loop control technology in the servo control system theory is used to operate the joint motor of the real robot, and the continuous feedback through the robot joint The position information is sent to the 3D simulation system, and the basic robot operation program is formed through the 3D simulation system.
[0015] The system includes sensors 5 arranged at the positions of the joints of the robot, torque sensors 7 for detecting joint torque, and joint motors 6 for driving the joints. The joint motors 6 are controlled by the servo control system 4 in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More