

Decoupling parallel mechanism
A parallel and decoupling technology, applied in the direction of manipulators, program-controlled manipulators, metal processing machinery parts, etc., to achieve the effects of fast motion response, reduced development costs, and convenient installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
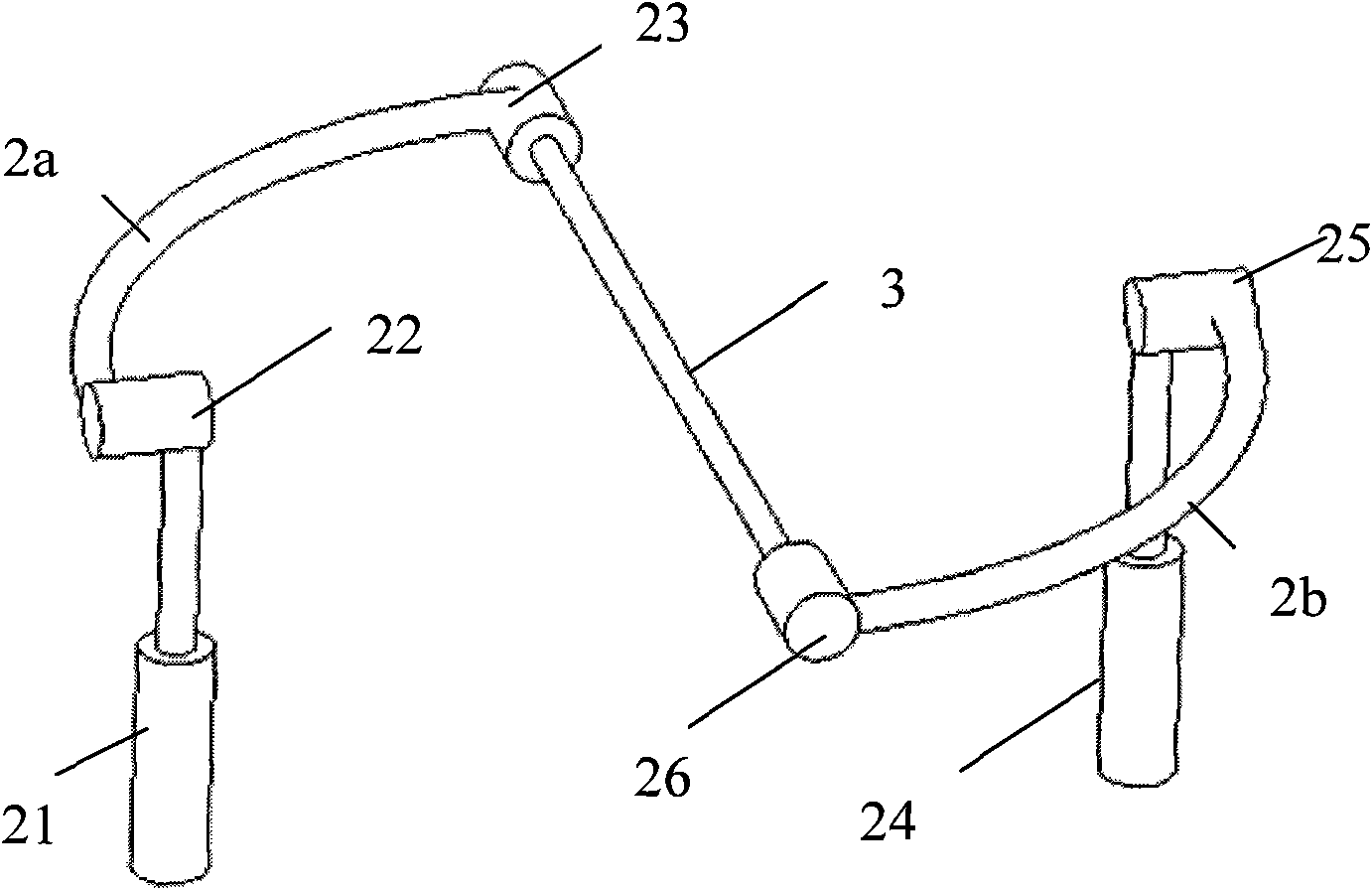
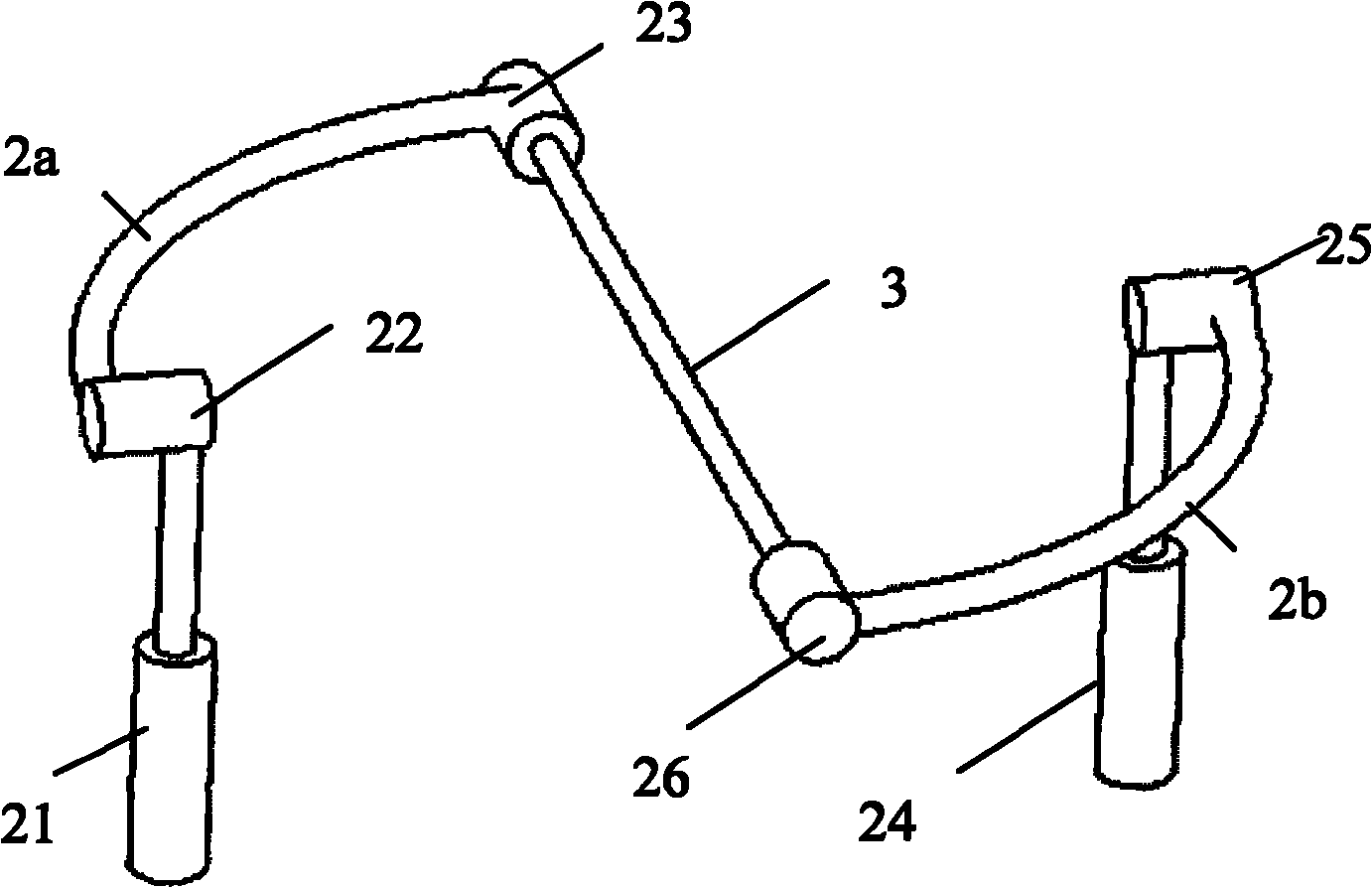
[0019] The two rotations and one movement of the decoupled virtual axis machine tool and the robot in the present invention are used for the parallel mechanism of the virtual axis machine tool and the robot, such as figure 1 As shown, it consists of a frame, a moving platform 3, and two motion branch chains 2a and 2b connecting the frame and the moving platform 3. The motion branch chain 2a includes a moving pair 21, a rotating pair 22, a rotating pair 23 and a rod , one end of the moving pair 21 is connected to the frame, and the other end is connected to the rotating pair 22 and the rotating pair 23 in turn through a rod, the rotating pair 23 is connected to the platform 3, the moving pair 21 is radially arranged, and the described rotating pair 22 and the rotating pair 23 are axially Set, the horizontal included angle of rotating pair 22 and rotating pair 23 is 90 degrees; Described kinematic branch chain 2b comprises moving pair 24, rotating pair 25, rotating pair 26 and ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More