

Double pseudo satellite aided position calibration method of inertial navigation system
An inertial navigation system and inertial navigation system technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, measurement devices, etc., can solve the problems that satellite navigation systems are susceptible to interference, etc., and achieve simple and flexible settings and improved accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
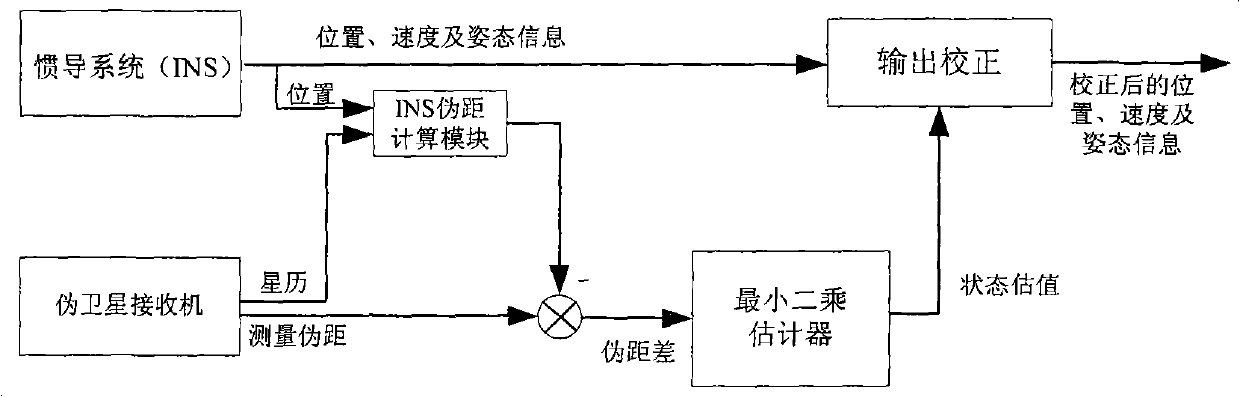
[0017] The position calibration method of the dual pseudolite-assisted inertial navigation system proposed by the present invention uses the least square method to estimate the position error of the inertial navigation system and calibrates it according to the pseudorange measurement information of the two pseudolites, thereby improving the accuracy of the inertial navigation system.
[0018] The specific implementation process of the present invention will be set forth below.
[0019] figure 1 A schematic diagram of the principle of the present invention is given. In the example, the northeast sky geographic coordinate system is used as the navigation coordinate system, considering the situation of plane positioning.
[0020] 1. Determine the variable to be requested
[0021] The variables to be estimated by the dual pseudolite-assisted inertial navigation position calibration algorithm are: the out-of-synchronization time Δτ between the inertial navigation system and the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More