Seven- freedom degree mechanical slave-hand device for minimally invasive surgery
A technology of minimally invasive surgery and degrees of freedom, applied in the field of medical devices, can solve problems such as inability to apply general surgery, and achieve the effects of no transmission gap, high flexibility, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
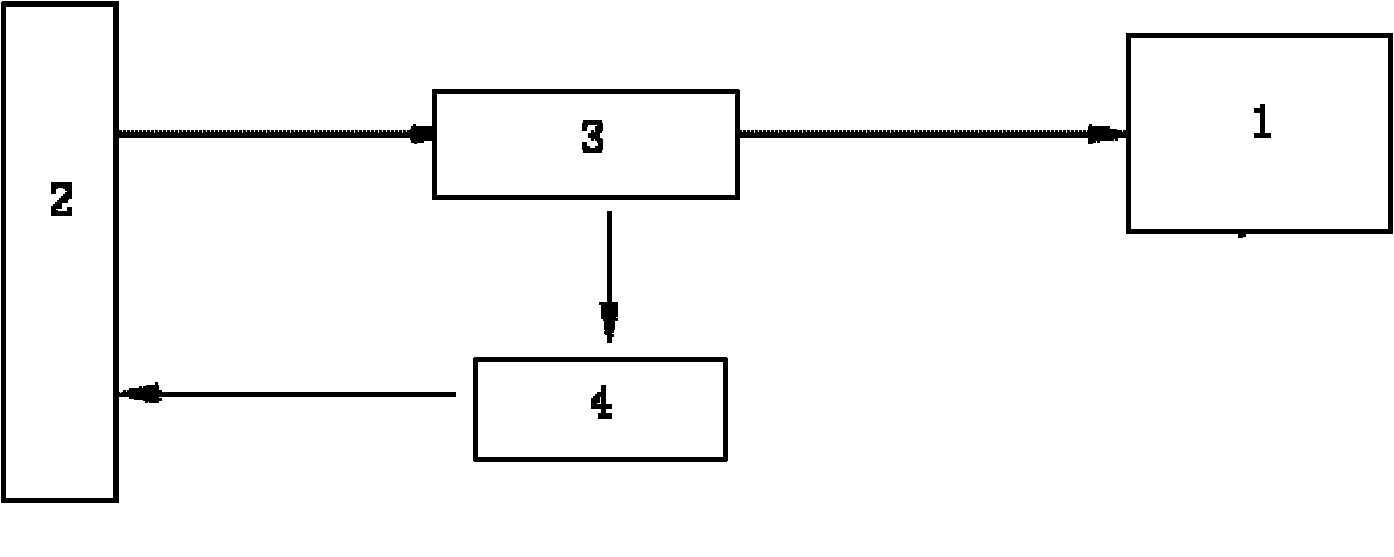
[0028] Such as figure 1 As shown: this embodiment includes: mechanical slave mechanism 1, processing controller 2, drive module 3 and sensor 4, wherein: processing controller 2 is connected with drive module 3, drive module 3 is connected with mechanical slave mechanism 1, sensor 4 are respectively connected with the drive module 3 and the processing controller 2 to transmit position and speed information.
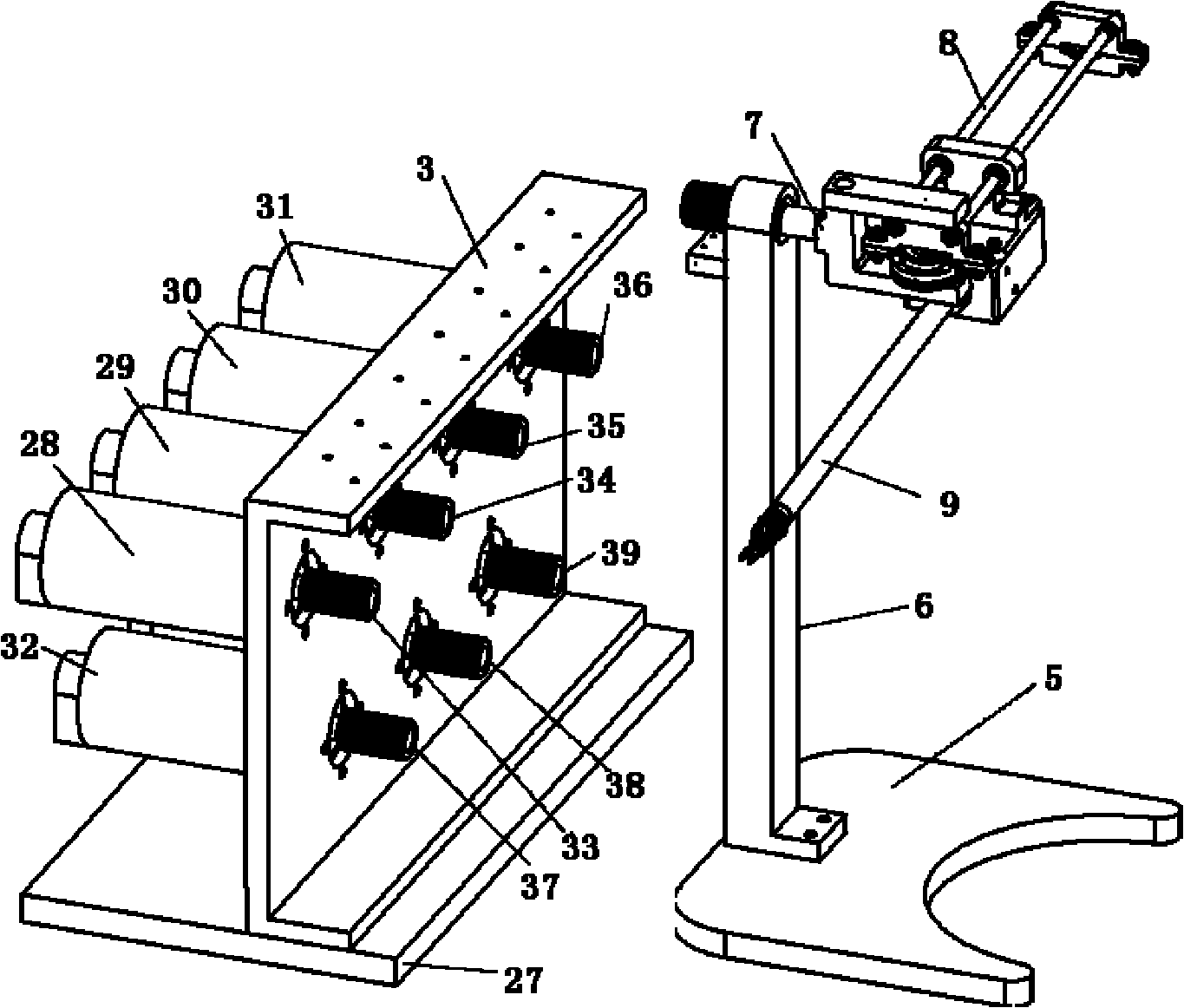
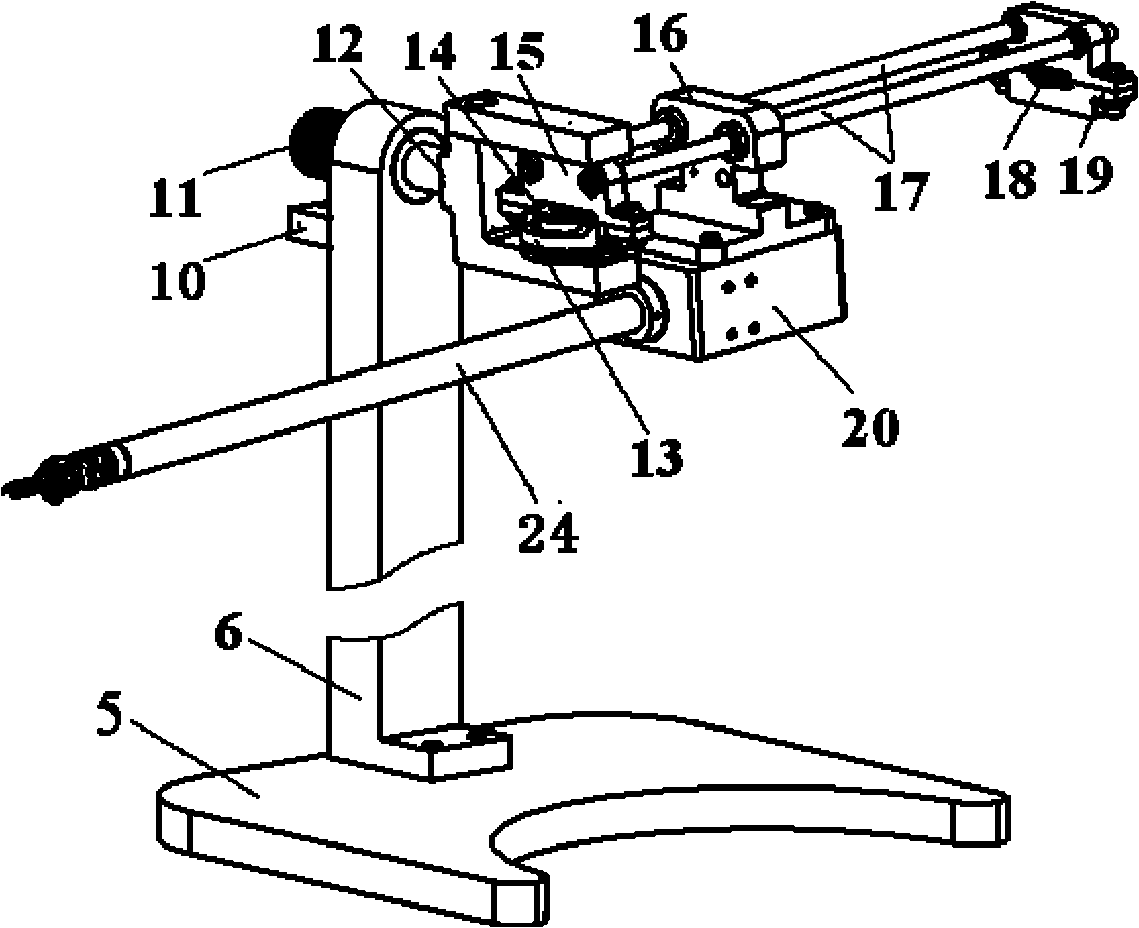
[0029] Such as figure 2 As shown, the mechanical slave mechanism 1 includes: a base 5, a column 6, a posture module 7, a position module 8 and an end effector ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More