

Three-rack slider coupling adaptive underactuated robot finger device
A robot finger, underactuated technology, applied in the field of anthropomorphic robot hands, can solve the problems of increased manufacturing, installation and maintenance costs and difficulties, high manufacturing and processing costs, internal motor power consumption, etc., and achieves high adaptability and low manufacturing and processing costs. , the effect of easy installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
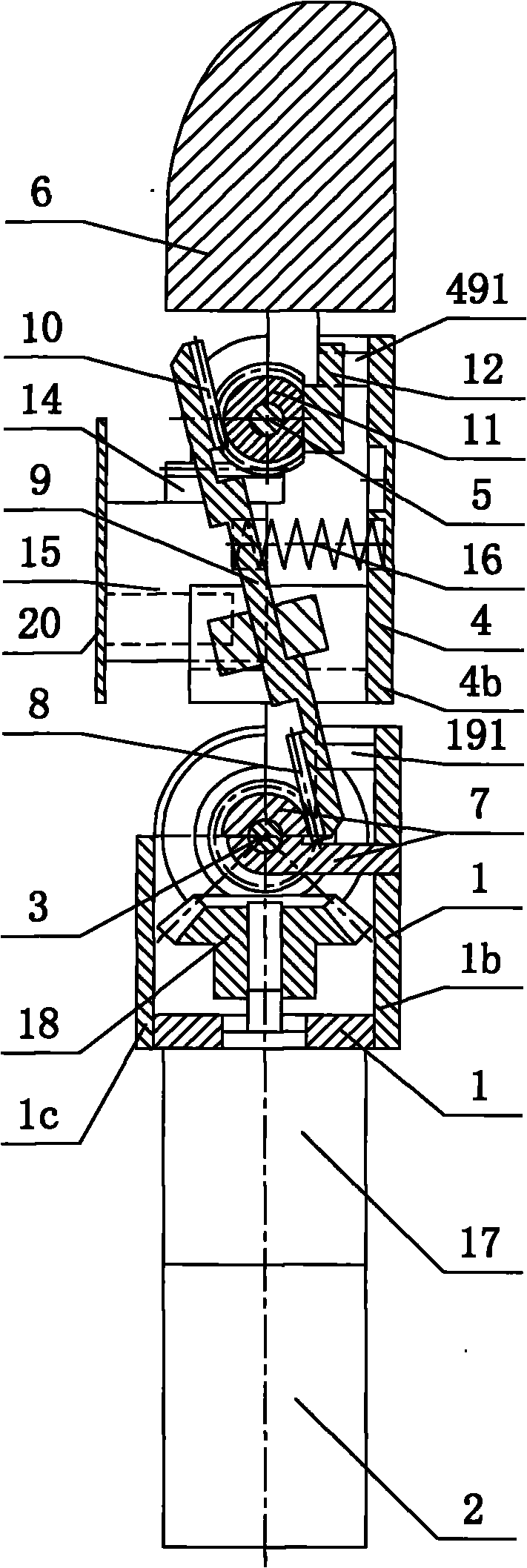
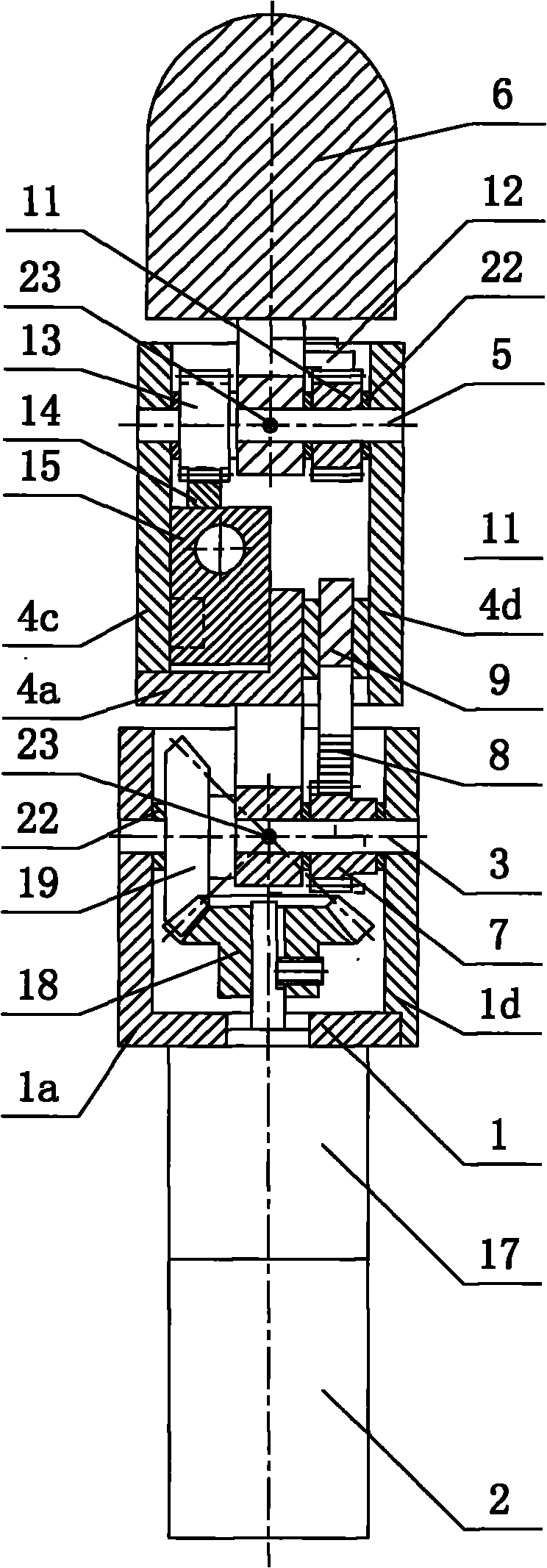
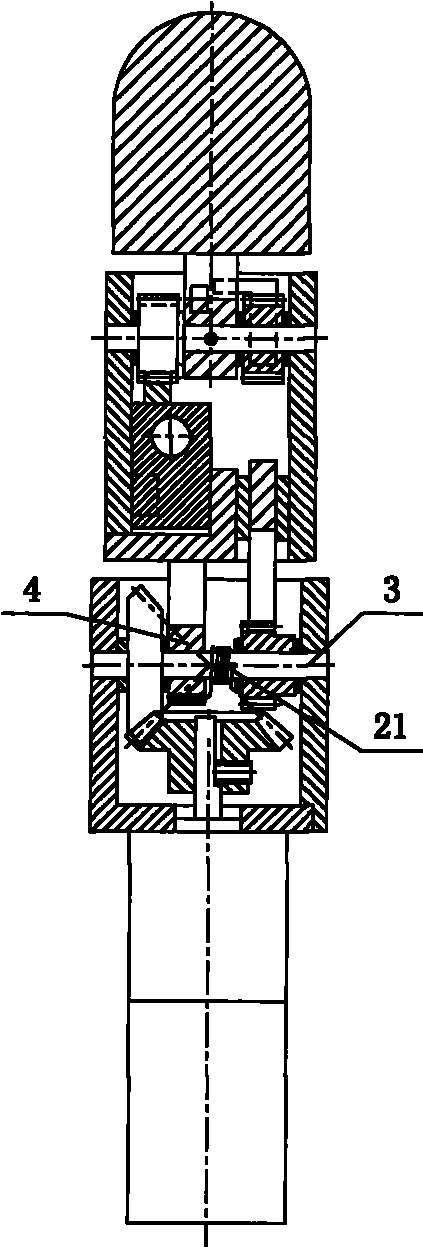
[0043] An embodiment of a three-rack slider coupling adaptive underactuated robot finger device designed by the present invention, the cross-sectional view is as follows figure 1 , 2 As shown, it looks like Figure 5 , 6 As shown, the three-dimensional appearance is as Figure 7 As shown, some parts such as Figure 8 As shown, the three-dimensional exploded diagram is shown as Figure 9 As shown, the action principle is as follows Figure 10 , 11 , 12, 13, 14, 15, 16, 17, 18, 19, 20, 21. The present embodiment comprises a base, a proximal joint shaft, a first finger segment, a distal joint shaft, a second finger segment 6 and a motor 2, the motor 2 is arranged in the base 1, and the output shaft of the motor 2 is connected to the proximal joint shaft 3 connected; the prox...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More