

Rotating and swinging joint module of robot of single degree of freedom
A technology of joint modules and robots, which is applied in the field of robots, can solve the problems of unsatisfactory weight-moment ratio, difficulty in meeting a wide range of needs, and many degrees of freedom of modules, and achieve the effect of compact structure, small axial size, and good reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to better understand the present invention, the following will be further described in conjunction with the accompanying drawings.
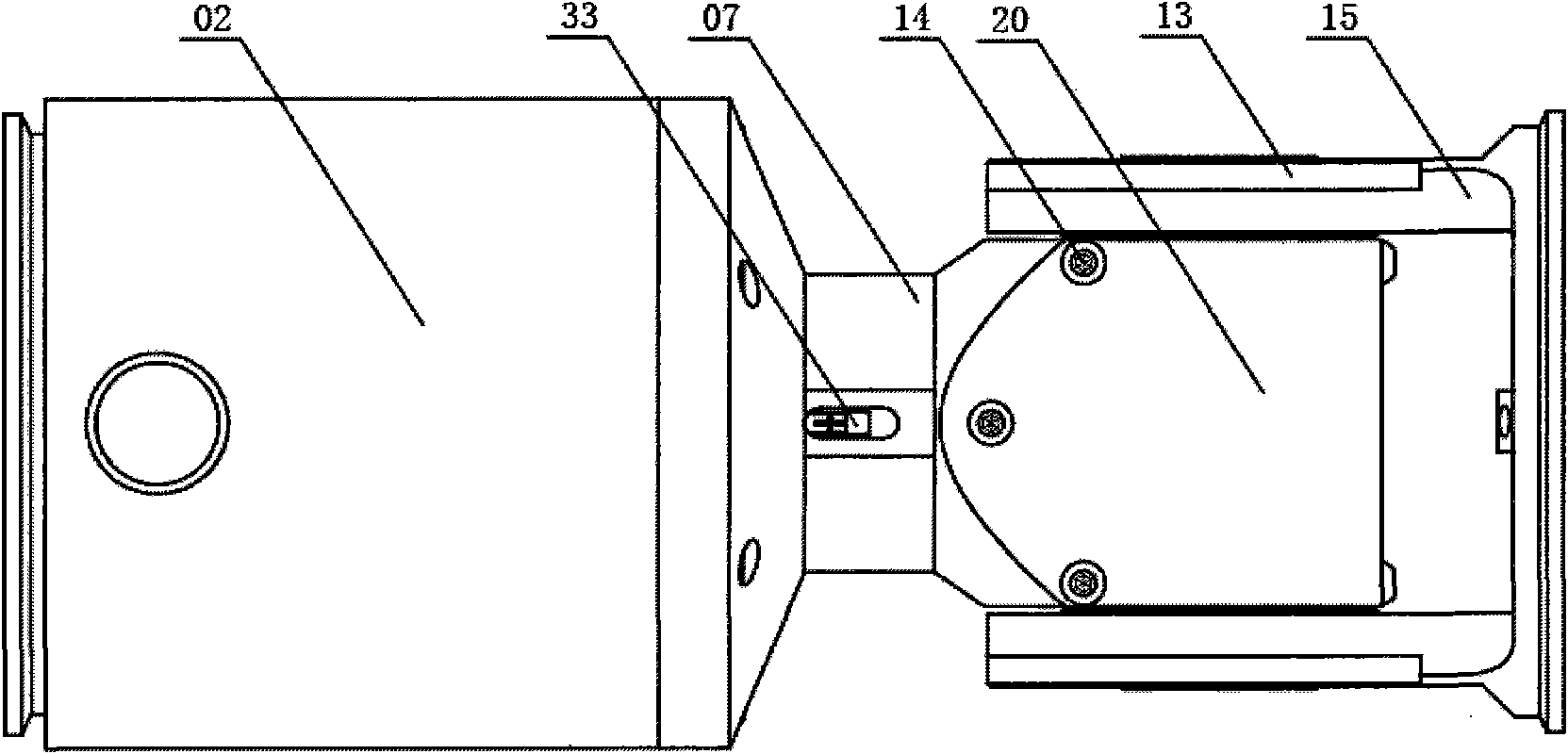
[0017] like figure 1 Shown is the appearance diagram of the swing joint module of the present invention. The motor base 02 and the joint base 07 in the figure are fixed together by screws as the basic part of the entire joint module, and the joint swing member 15 and the transition end cover 13 of the swing joint are also fixed together by screws. These two parts can make relative swing. Cover 20 is fixed on the joint seat 07 with screw 14, and a pair of bevel gears and their shafts are wrapped, which is both for safety and for sealing and dustproof.
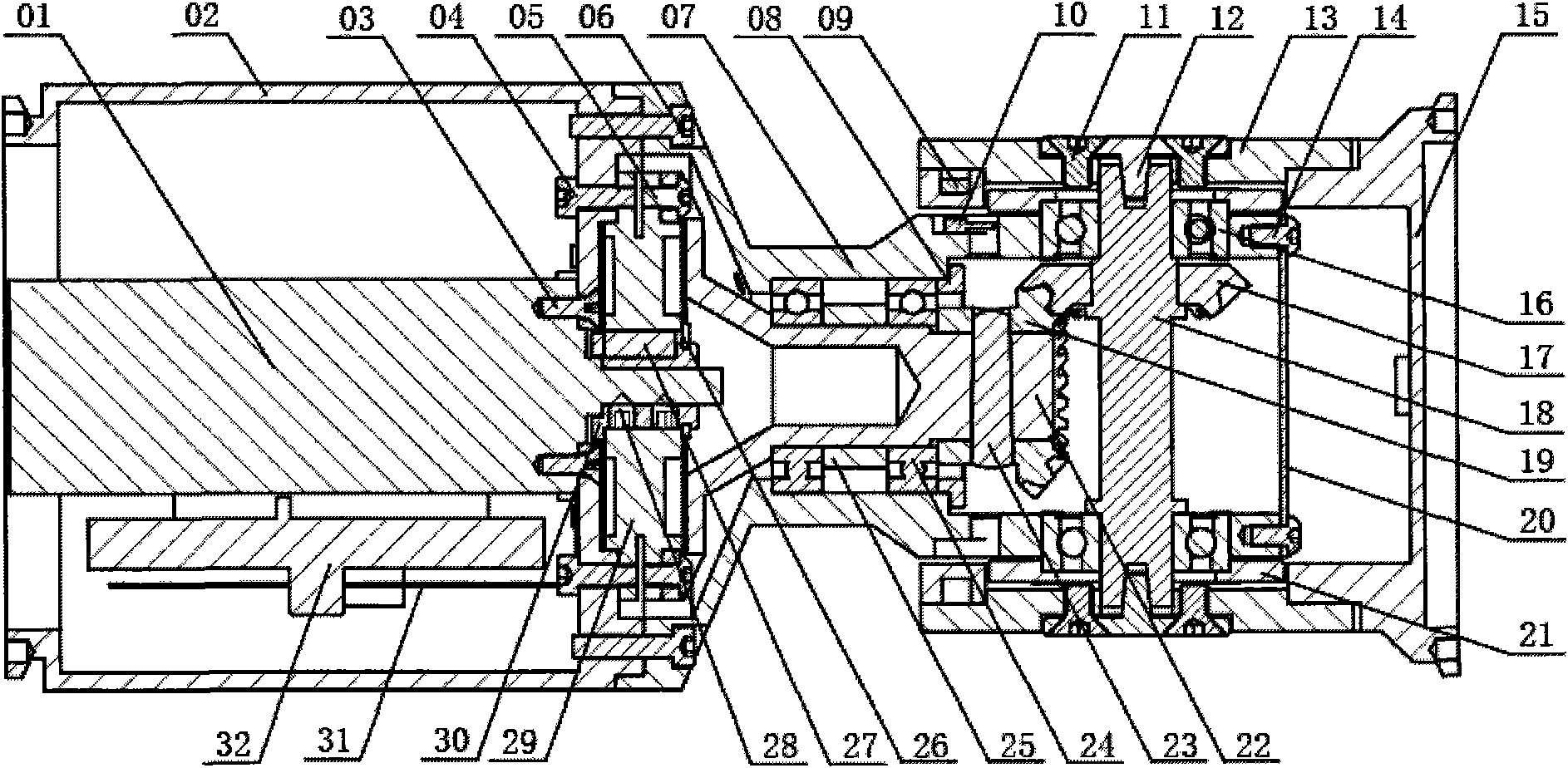
[0018] like figure 2 Shown is a cross-sectional view of the T-shaped joint module of the present invention. exist figure 2 In , the joint axis of the module is perpendicular to the centerline of the connecting rod. Parts include: servo motor and photoelectric encoder assembl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More