

Asymmetrical gear six-rod bionic bouncing mechanism
An asymmetric and gear technology, applied in the field of miniature bouncing robots, can solve the problems of different gear parameters, unstable take-off action, unreasonable structure and force characteristics of the bouncing mechanism, etc., and achieve the effect of simple structure and control, and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
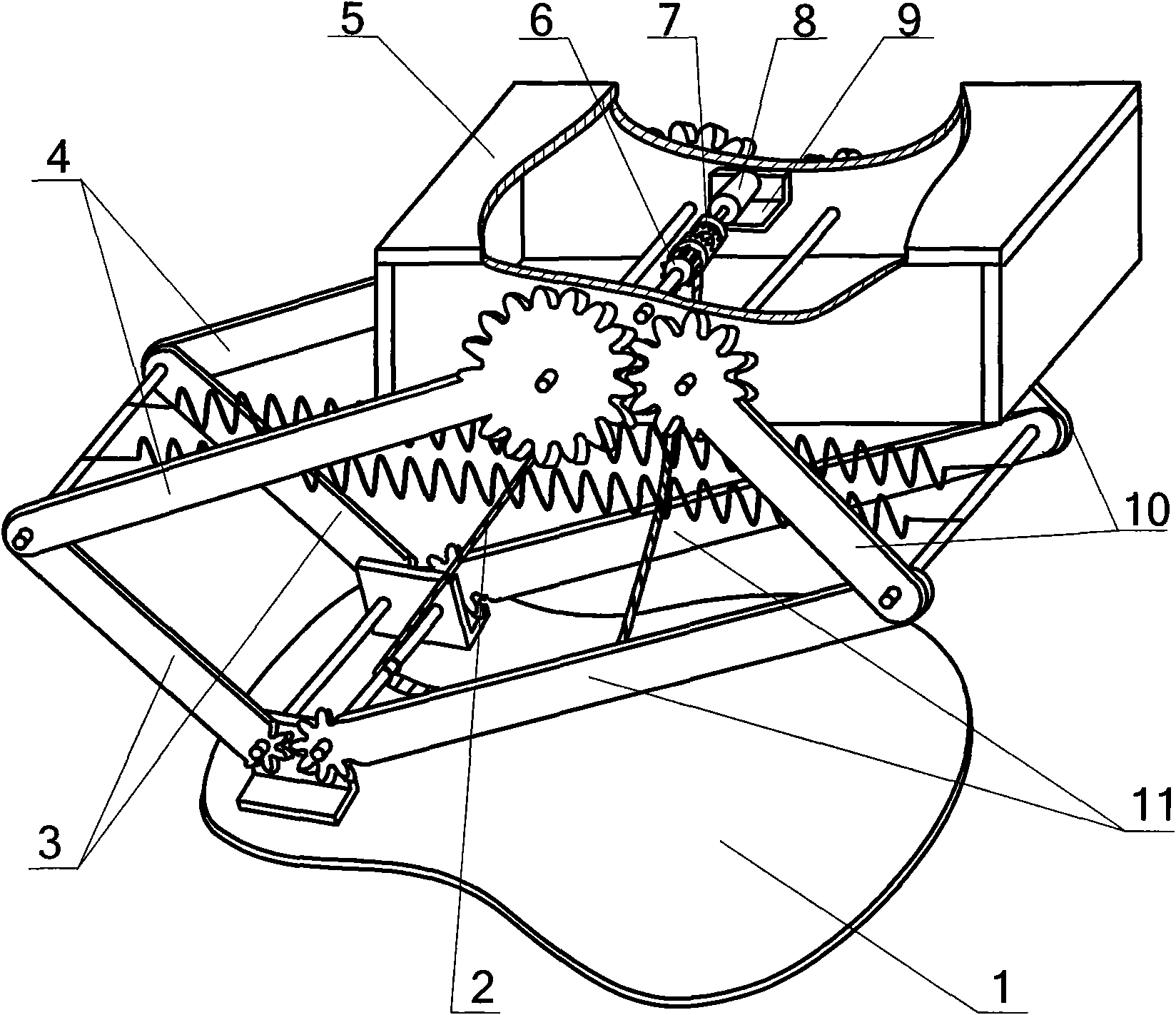
[0023] The asymmetric gear six-bar bionic bouncing mechanism includes a fuselage 5, a leg mechanism, a sole plate 1 and an energy storage and release device.
[0024] Such as figure 1 Shown, fuselage 5 is equivalent to the health of kangaroo, is the cuboid housing that does not have lower bottom cover that is made up of five sheet parts; is located below the fuselage, its top is connected with the fuselage, and its bottom is connected with the sole plate support 27; the sole plate 1 is a thin plate, which is equivalent to the sole of a kangaroo; the energy storage and release device is located in the fuselage 5, through The sprocket chain drives the leg mechanism.
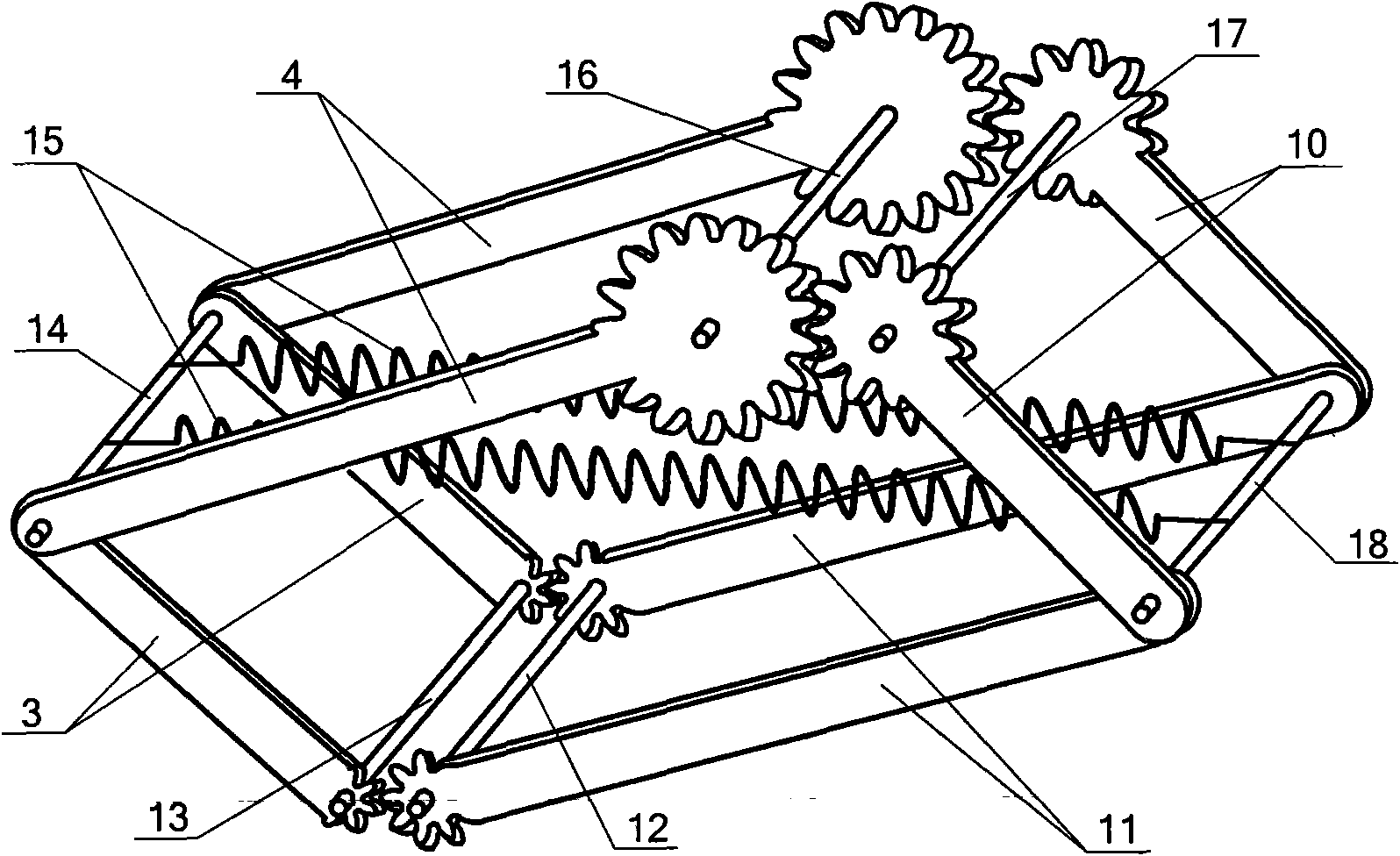
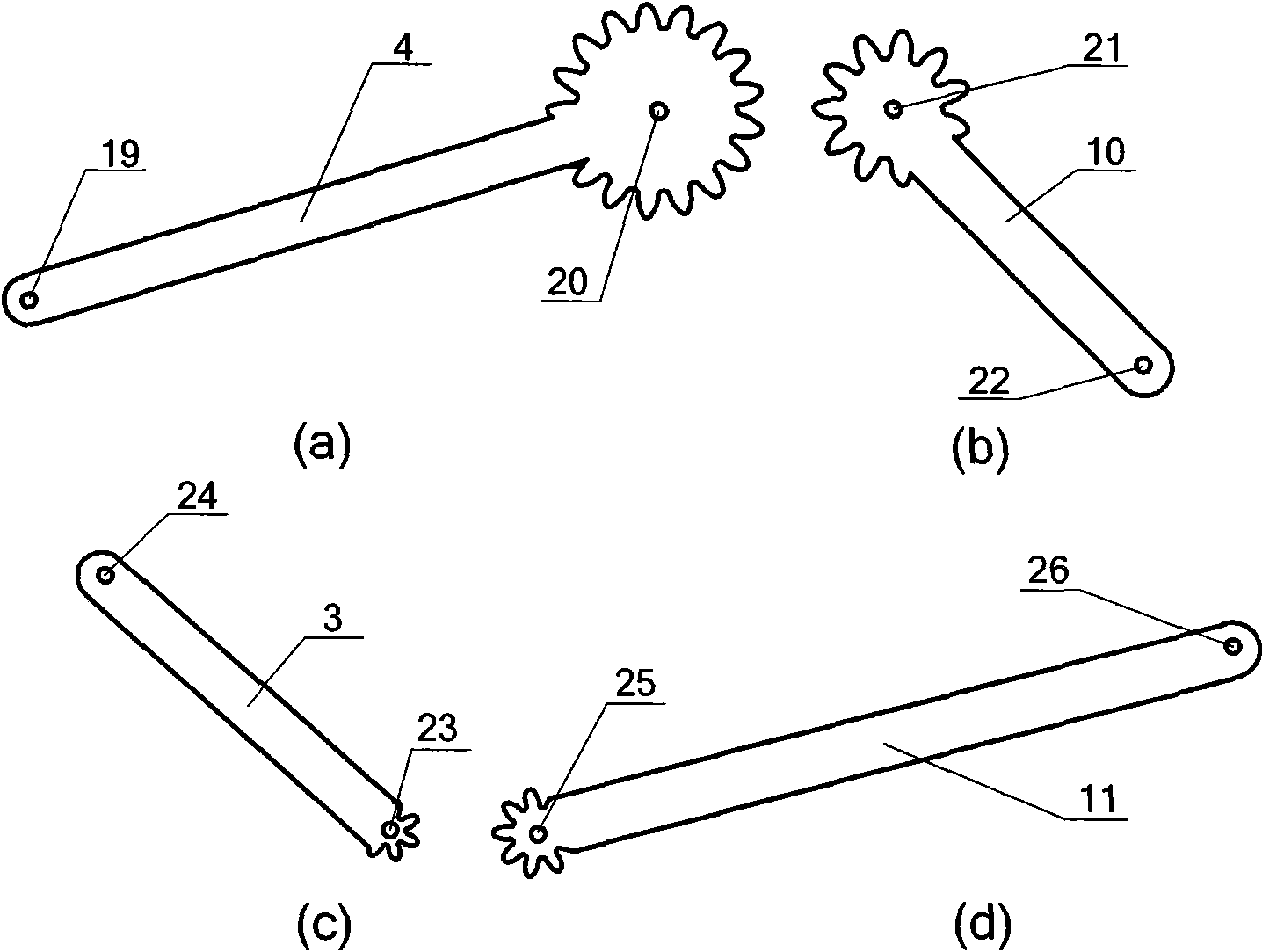
[0025] Such as figure 2 with image 3 As shown, the leg mechanism includes a thigh bar 10, a calf bar 11, a long auxiliary bar 4, a short auxiliary bar 3, a spring 15 and a joint connection shaft. Wherein the thigh bar 10, the calf bar 11, the long auxiliary bar 4 and the short auxiliary bar 3 are connecting r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More