

Machine vision based weeding robot system and method thereof
The technology of a weeding robot and a robot system is applied in the field of field weeding robot system, which can solve the problems of high seedling injury rate, low weeding efficiency, and staying in experimental research, etc., and achieves the effects of reducing the seedling injury rate and reducing agricultural pollution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the purpose, content, and advantages of the present invention clearer, the implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
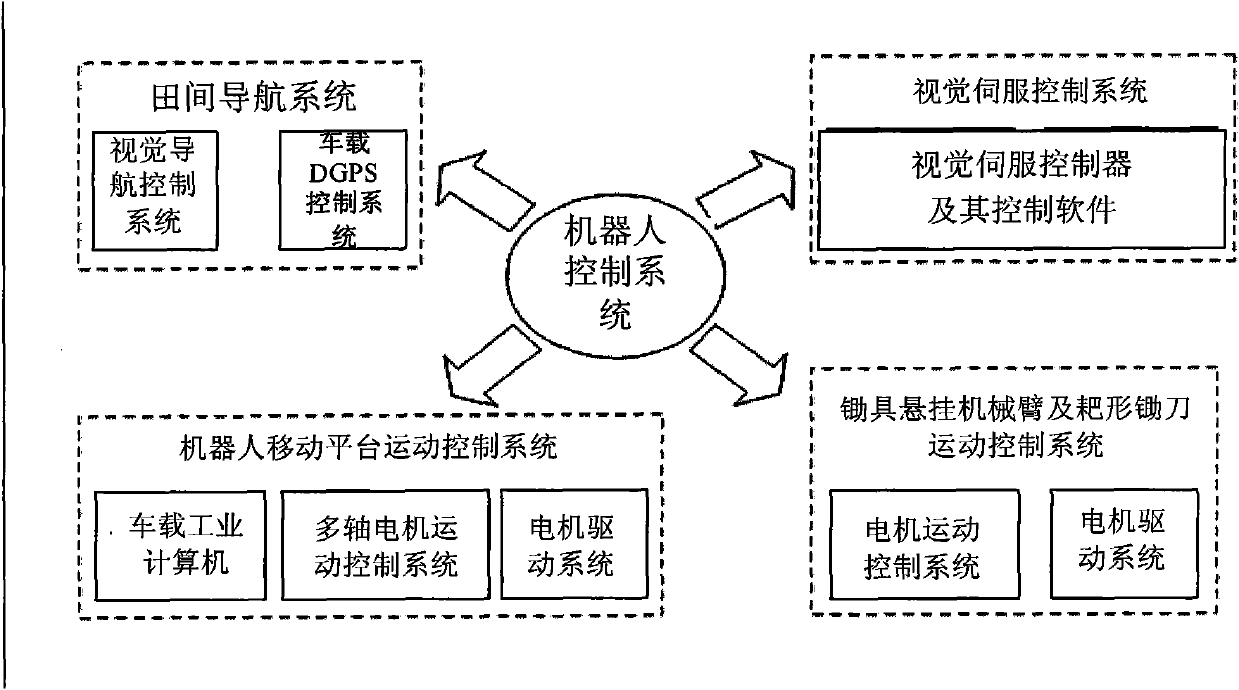
[0031] The invention is designed for sparsely planted crops, uses multi-sensor fusion field navigation and machine vision-based rapid grass seedling identification technology, and controls the precise operation of weeding knives through a visual servo control system, which greatly improves the efficiency of mechanical weeding while realizing effective mechanical weeding. The rate of seedling injury has been reduced to a certain extent, and agricultural pollution has been reduced.
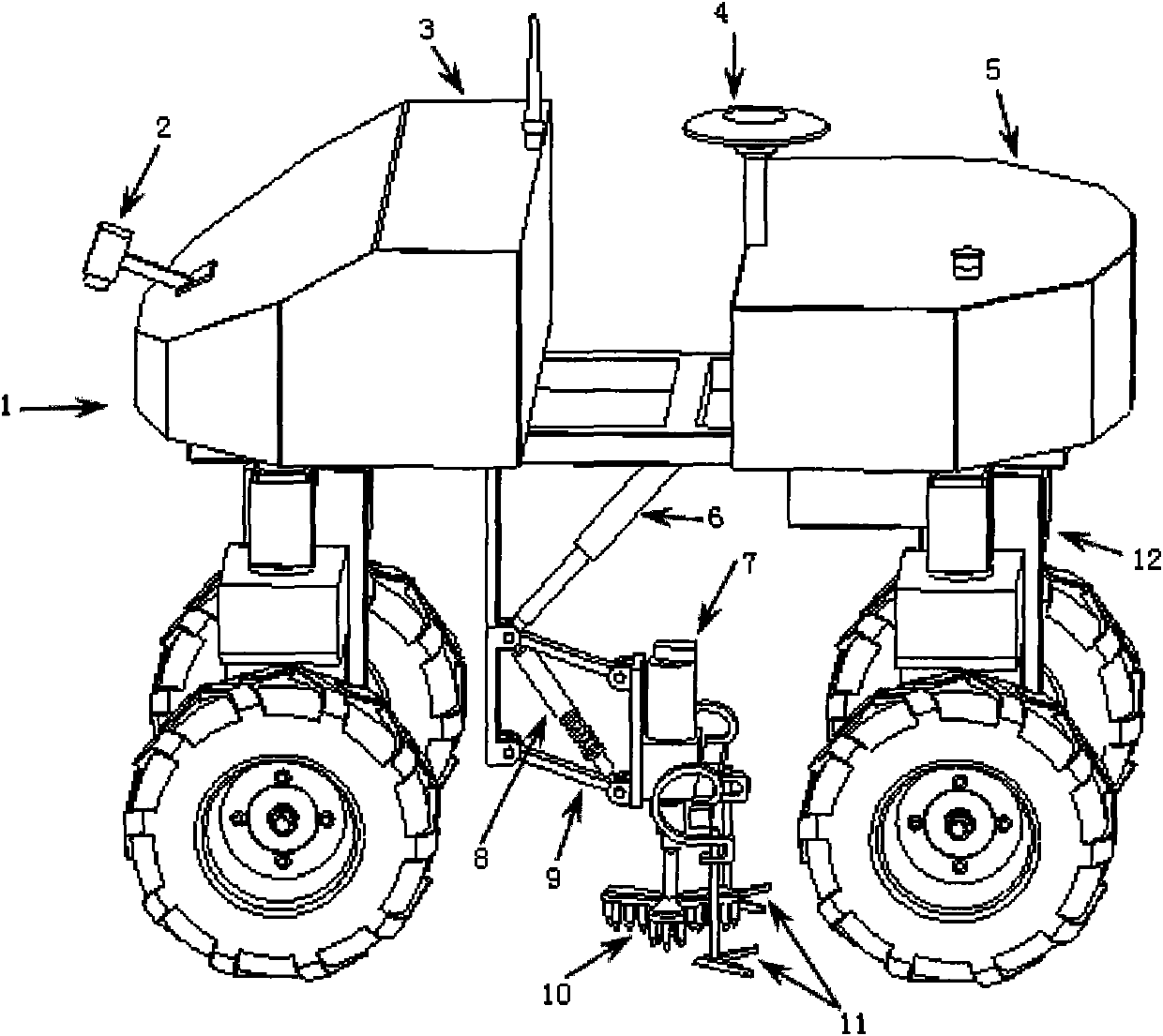
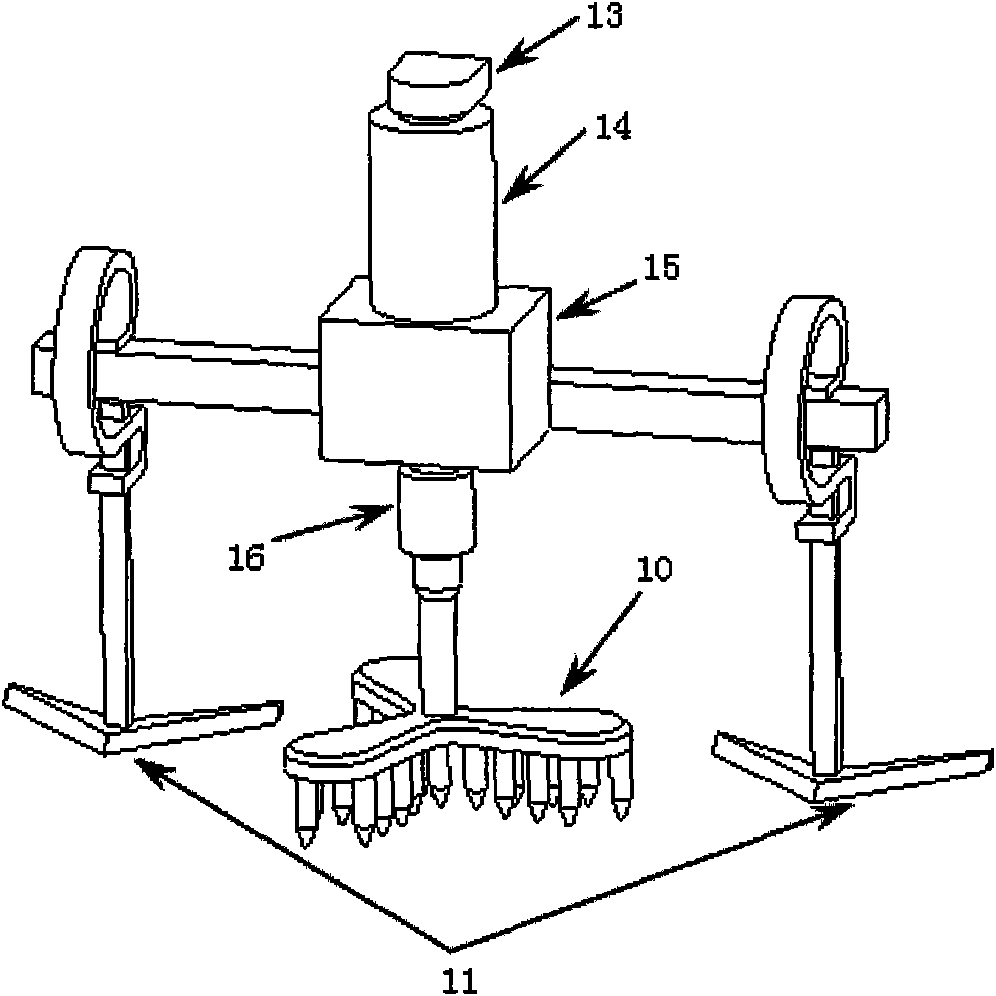
[0032] A weeding robot system based on machine vision of the present invention includes a robot mobile platform 1, a field navigation device based on multi-sensor fusion technology, a field grass identification device, a high-efficiency and low accidental injury rate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More