

Fish-eye camera stereo vision depth measuring method based on Taylor series model
A Taylor series and fisheye camera technology, applied in the field of computer vision, can solve problems such as difficult compensation, large distortion, and bending of field of view, and achieve the effects of reduced computational complexity, high modeling accuracy, and simple principles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
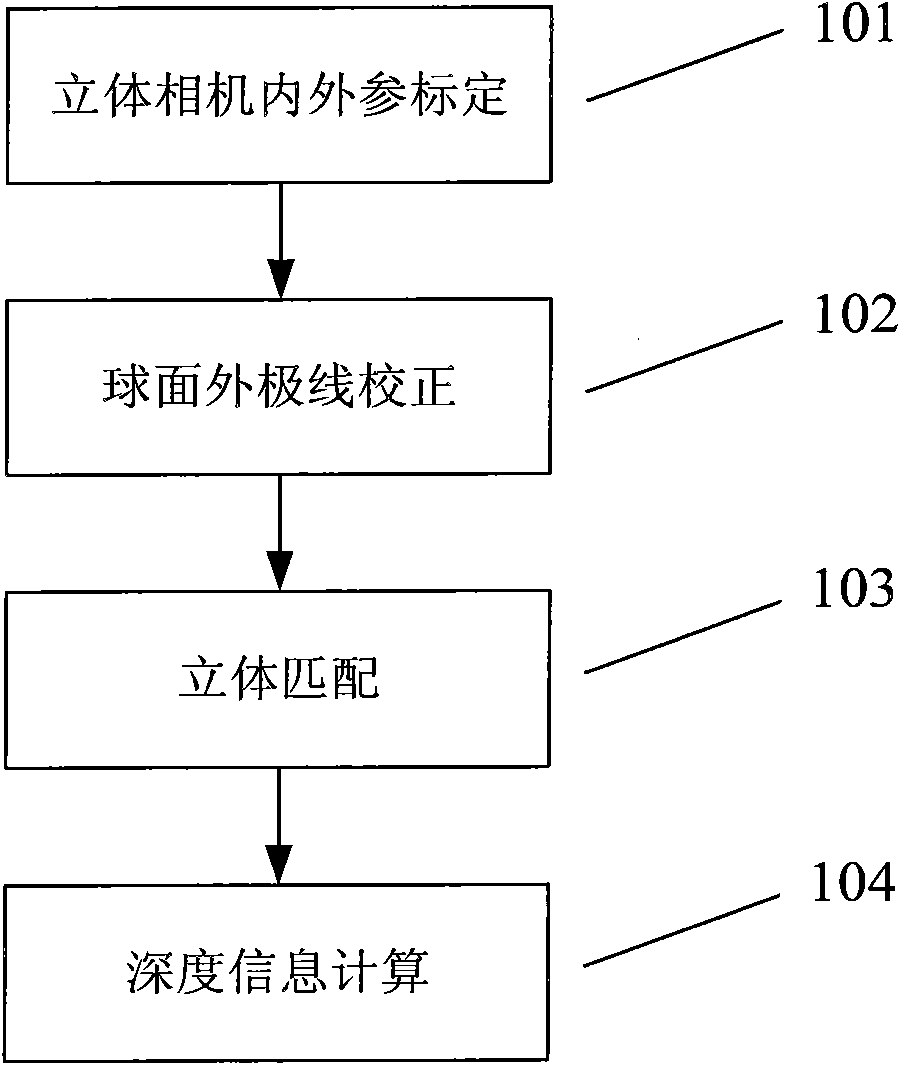
[0034] like figure 1 As shown, the flow chart of the depth calculation of the ultra-wide-angle fisheye camera stereo vision method based on the Taylor series model is given according to the present invention.
[0035] like figure 1 As shown, in step 101, the Taylor series model is used to calibrate the internal and external parameters of the ultra-wide-angle fisheye stereo camera.
[0036] Through the calibration based on the Taylor series model, the internal parameters of the camera that can be obtained are:
[0037] 1) Taylor series coefficient: a 0 , a 1 ,...,a N
[0038] 2) Affine transformation coefficients: c, d, e
[0039] 3) Principal point coordinates: (x c ,y c )
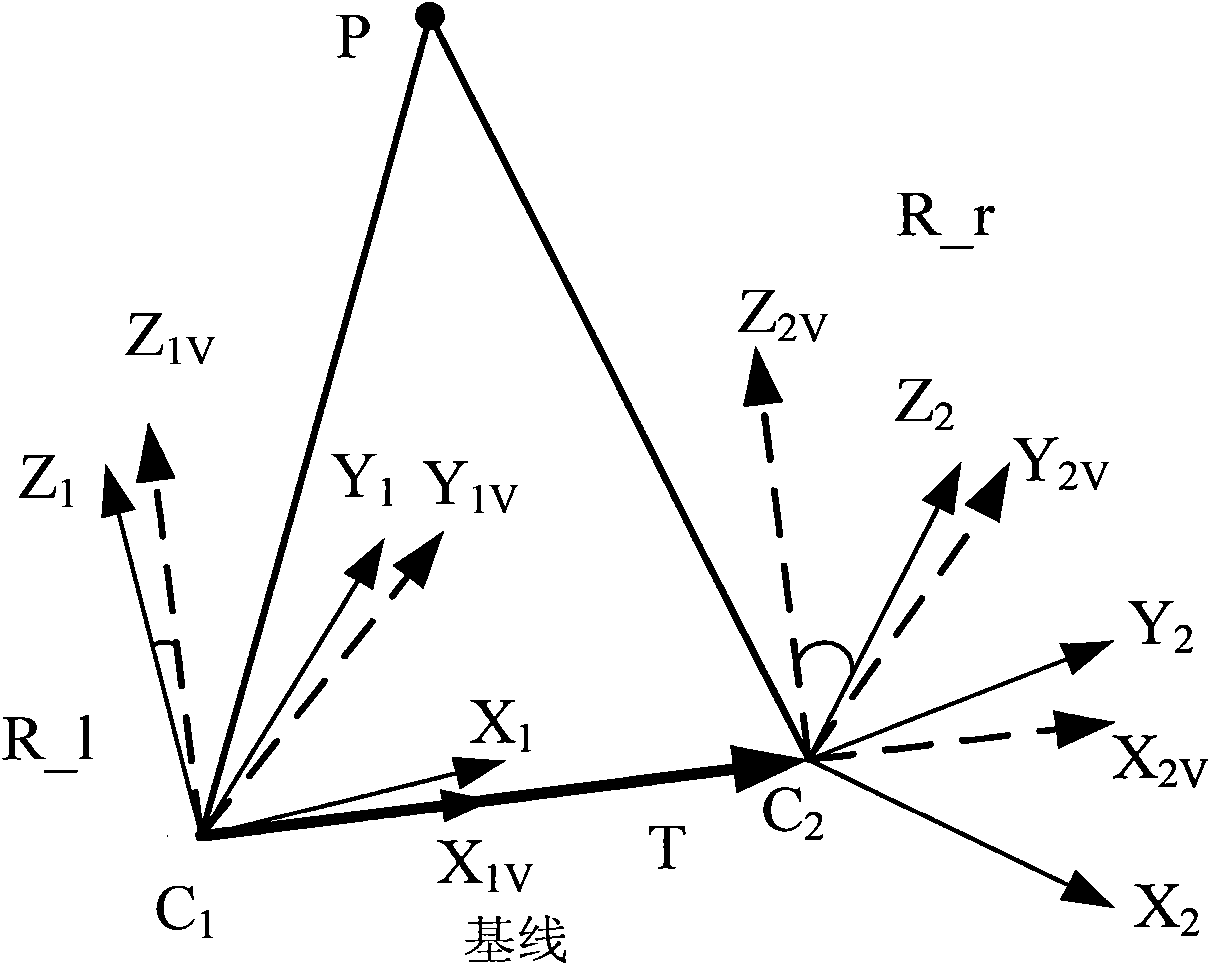
[0040] At the same time, the external parameters of the left and right fisheye stereo cameras are obtained: R l , t l and R r , t r . According to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More