

Clustering-based multi-robot task distributing method for use in exploiting tasks
A task allocation and multi-robot technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve complex design patterns, do not consider the locality of individual interaction, system flexibility, poor real-time performance, etc., to achieve a flexible environment The effect of change, design simplification, and flexible adaptation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
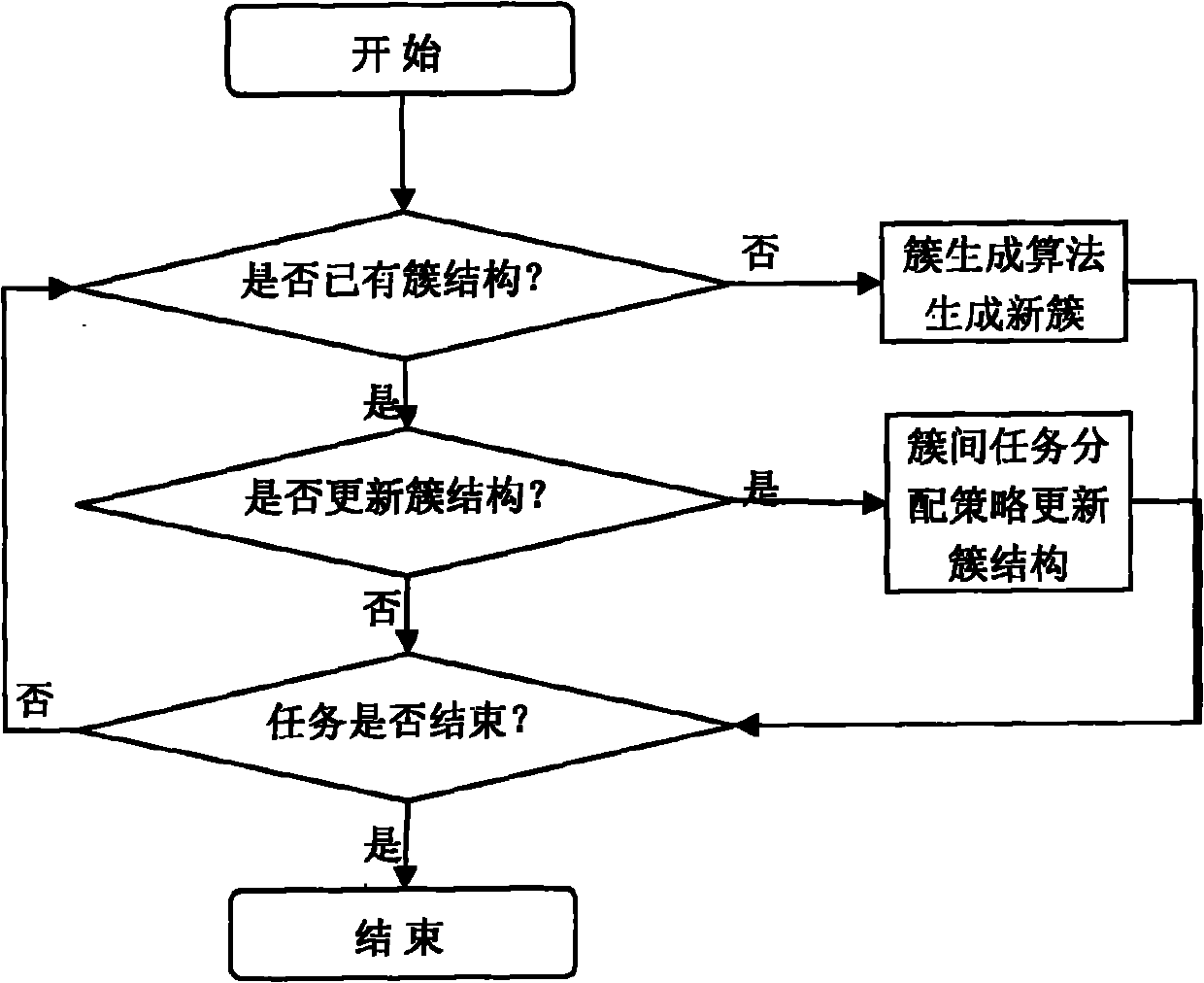
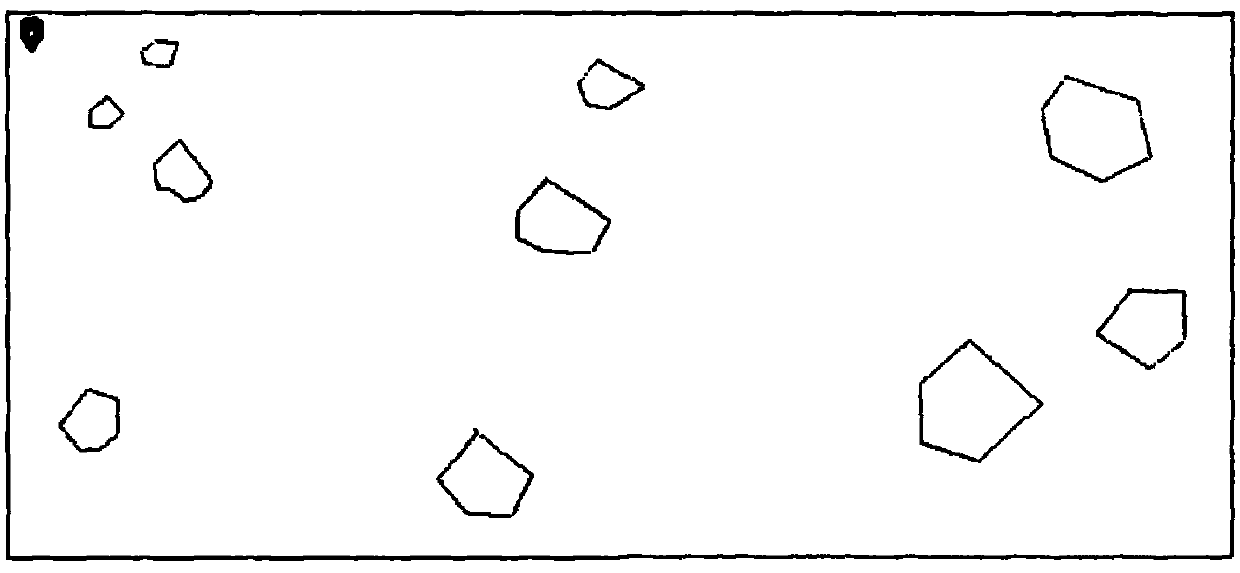
[0028] In order to verify the effectiveness of the method and analyze the performance of robot cooperative exploration from different perspectives, the cluster task allocation method is used to realize the cooperative exploration of multi-robots in unknown environments. The experimental environment is an indoor complex environment with a size of 9m×18m, and the number of grids is selected to be 100×200, such as figure 2 shown. There are local regions of varying complexity in the graph, mainly depending on the local obstacle density in the environment. In order to be able to explore the environment more completely, the route of the robot to explore the environment still uses the route of the weeder. Assuming that the robot's sonar sensor perception error and odometry error are 0, the environment modeling method uses a simple Bayesian rule to update the environment map. Since the clustering method adopts the multi-robot self-organization task allocation strategy under local i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More