

Space-controlled five degree of freedom twelve-rod welding robot mechanism
A technology with degrees of freedom and space, applied in welding equipment, auxiliary welding equipment, program-controlled manipulators, etc., can solve the problems of joint error accumulation, heavy arm, poor rigidity, etc., and achieve small error accumulation, high control precision, and strong bearing capacity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
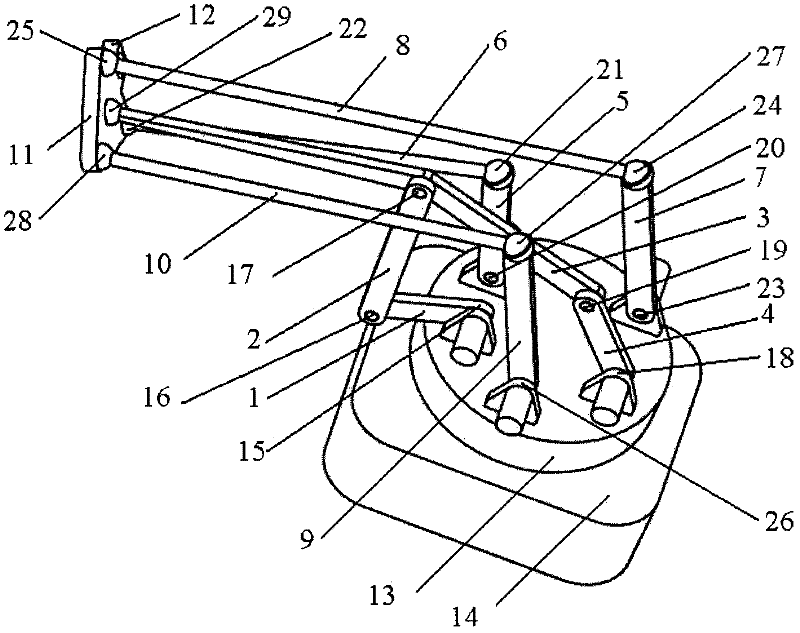
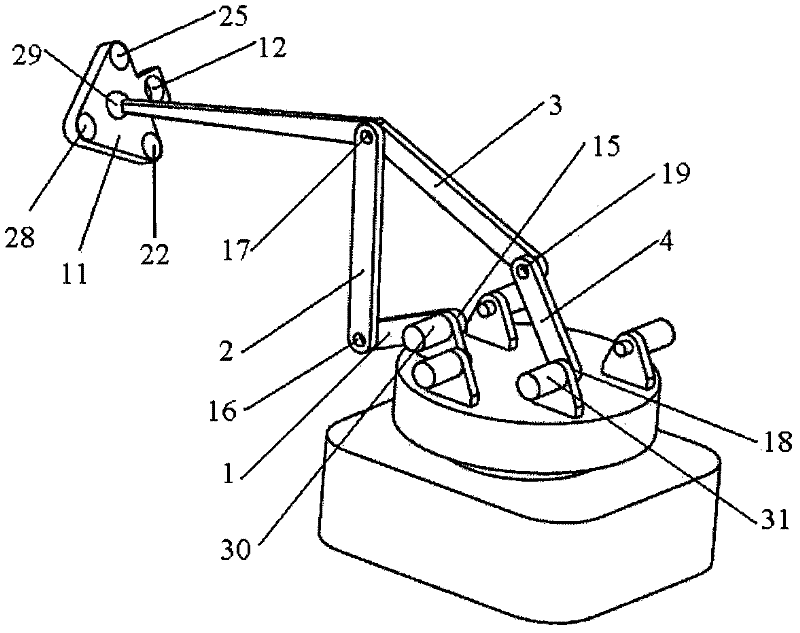
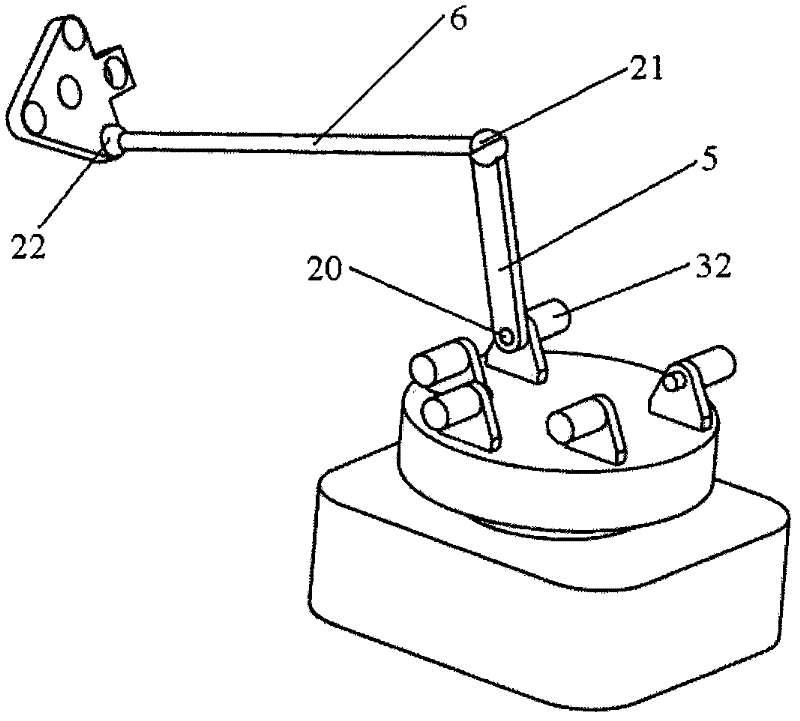
[0026] control figure 1 , 6 , 7, 8 and 9, a space five-degree-of-freedom twelve-rod controllable welding robot mechanism, including a planar two-degree-of-freedom controllable mechanism branch chain, a first attitude adjustment branch chain, a second attitude adjustment branch chain, a third Attitude adjustment branch chain, moving platform 11 with flange 12 and frame 13. The frame 13 is installed on the rotary platform 14 to realize the six-degree-of-freedom movement of three-dimensional translation and three-dimensional rotation of the entire robot space.
[0027] control figure 1 , 2 , the planar two-degree-of-freedom controllable mechanism branch chain is formed by connecting the first active rod 1 , the second active rod 4 , the first connecting rod 2 , the second connecting rod 3 and the frame 13 . One end of the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More