

Method for evaluating control performance of PID (Proportion Integration Differentiation) loop based on subspace identification
A subspace identification and loop control technology, applied in the field of PID control applications, can solve problems such as harsh performance evaluation standards, not considering the experience and knowledge of engineers, and complex calculation processes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0057] The process model corresponding to a given PID loop is
[0058]
[0059] Using a PID controller the law is , it can be seen from the system simulation that when When , the dynamic response of the system is good, and there is no vibration.
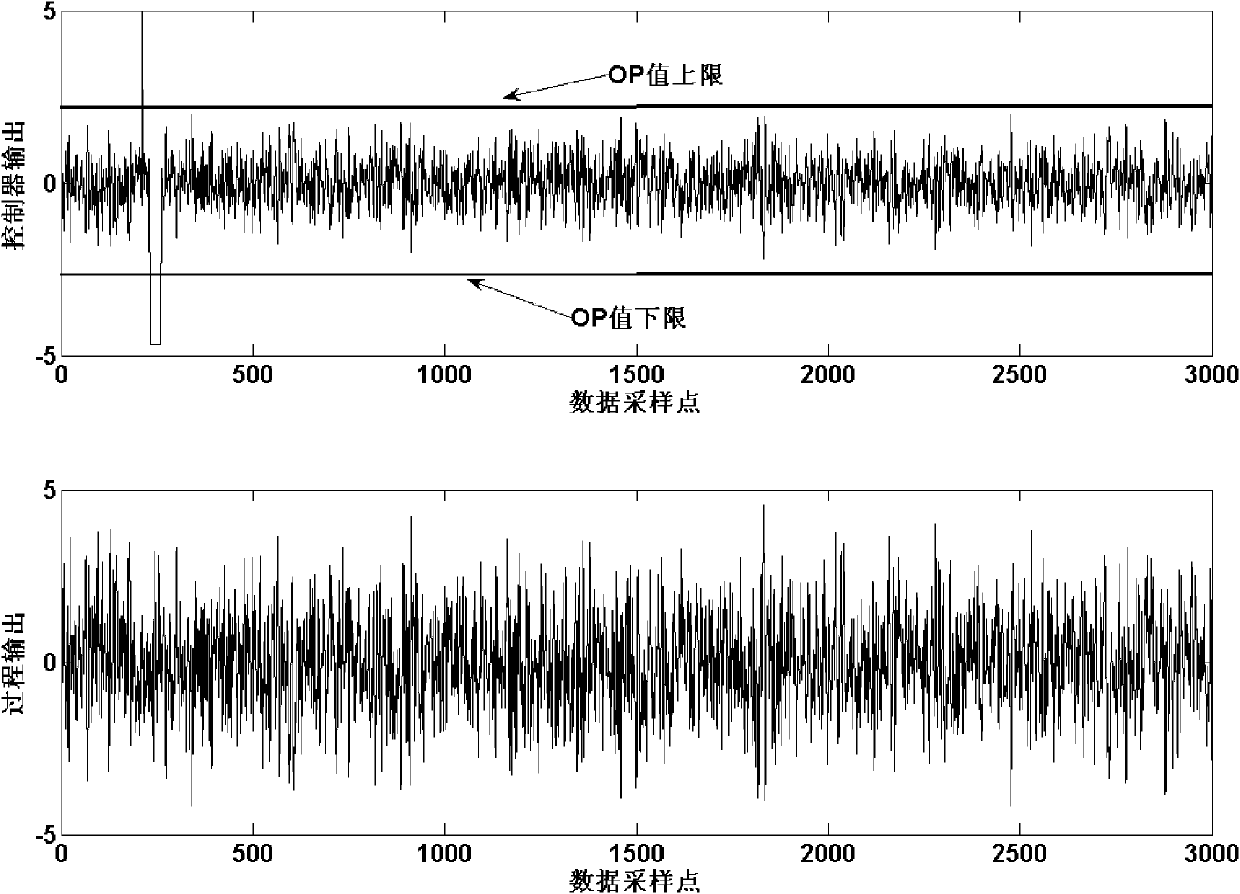
[0060] The above process simulation produces 3000 sets of controller output signal u and process output signal y, and the signal sampling time is , add the over-limit value and the open-closed loop state of the loop, so that the controller output signal u exceeds the upper limit constraint at time 211, exceeds the lower limit constraint at time 230 to 260, and makes the loop open-loop state at time 478 to 555, set the user expected reference time and steady state time , the corresponding controller output signal u and process output signal y such as figure 2 shown.
[0061] According to step 2), the controller output signal u and process output signal y are preprocessed, and the preprocessed controller output signal u ...
Embodiment 2
[0063] Figure 4 Shown is the controller output signal u and the process output signal y corresponding to the PID loop that oscillates due to inappropriate controller parameter setting. At this time, the controller output signal u is within the operating limit range at all times, and the loop does not When there is no open-loop state, the system signal sampling time is , set the reference time and steady-state time expected by the user as and .
[0064] According to step 2), the controller output signal u and process output signal y are preprocessed, and the preprocessed controller output signal u and process output signal y are used in steps 3) and 4), to obtain , it can be seen that the least squares fitting effect in the subspace identification process of the identified model is good, and the model has high reliability, which can be used for performance evaluation. The sequence of control performance indicators obtained by using the method described in step 4) and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More