

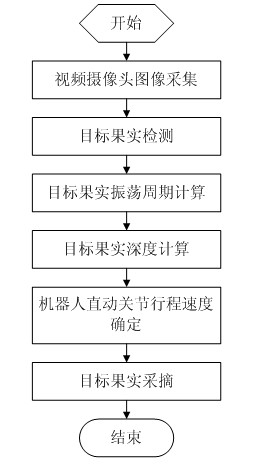
Picking method of picking robot under fruit oscillation condition
A picking robot and robot technology, applied in picking machines, manipulators, harvesters and other directions, can solve the problems affecting the picking efficiency of picking robots, and achieve the effects of reducing picking time, enhancing practicability, and improving picking efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
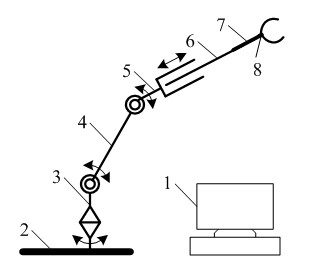
[0024] figure 2 The picking mechanism of the picking robot is mainly composed of waist 3, big arm 4, forearm 5, linear motion joint 6 and end effector 7, in which the waist 3, big arm 4, and forearm 5 are revolving joints, and the rotation of the waist 3 drives The base 2 of the mechanical arm moves, the linear motion joint 6 can extend the end effector 7, the waist 3, the upper arm 4, the forearm 5 and the linear motion joint 6 are integrated to realize the end effector 7 advancing and retreating in any direction in the working space; image acquisition Module 8 adopts the eye-on-hand installation method to realize the collection of fruit images; data processing and system control module 1 is responsible for image information processing and robot control.
[0025] Picking robot image acquisition module 8 can adopt two-dimensional camera, as CMOS video ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More