

Vision real-time measuring method based on color code block
A measurement method and a technology for marking blocks, which are applied in the field of robotics, can solve the problems of affecting accuracy, the attitude matrix cannot be guaranteed to be orthogonal, and the accuracy of feature points is not high, so as to achieve the effects of ensuring accuracy, good real-time performance, and improving usability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
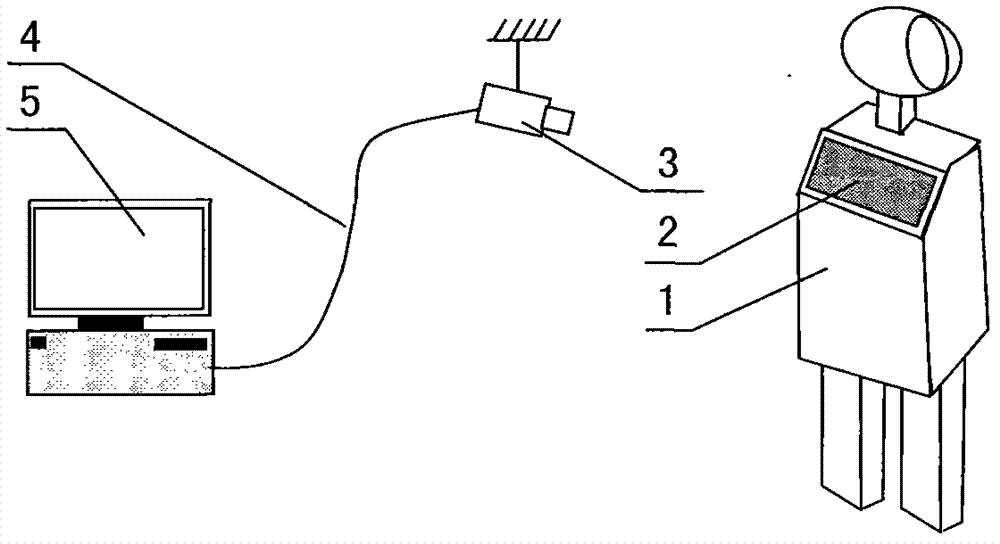
[0022] see figure 1 Show the schematic diagram of monocular vision measurement robot pose, utilize robot 1, color code block 2, video camera 3, network line 4 and computer 5, the present invention utilizes the color code block pasted on the robot back top as the mark of robot, for color code Block proposes a new image processing and feature extraction method to quickly obtain high-precision image coordinates of the four vertices of a rectangular color-coded block.
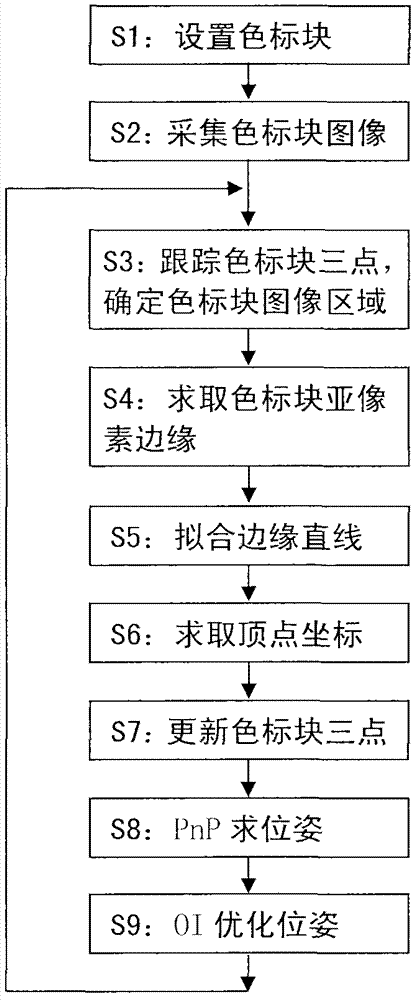
[0023] Such as Figure 2A Show the flow chart of the present invention based on the visual real-time measurement method of color code block, its step comprises as follows:
[0024] Step S1: a color-coded block 2 of known size is provided above the back of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More